基于ATmega32的遥控采摘机器人设计
时间:12-05 09:43
查看:1430次
下载:162次
简介:
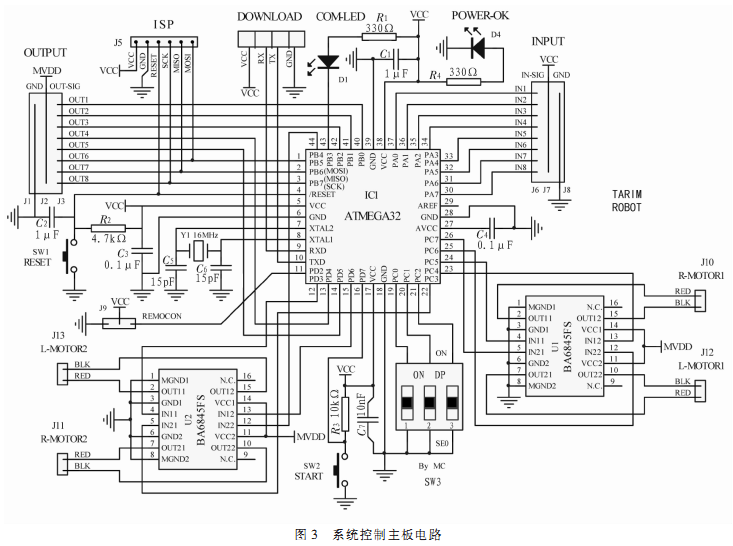
针对机器视觉采摘机器存在的技术不成熟,成本过高等不足,提出采用人工操控的半自动采摘技术,并进行了探索研究。设计了一款模拟采摘机器人,机器人以履带底盘为基座,三自由度机械臂,红外遥控操作。硬件电路以ATmega32为系统控制核心,采摘机器人的动作采用BL35P12为核心红外遥控控制。系统软件基于AVR Studio4开发环境,实现对机械臂运动的全方位精确控制。采摘机器人采用模块化设计,抓取速度快,成本低,易于实现,可扩展性强。