针对航天器的三维姿态控制问题,研究了一种新型的航天器姿态控制执行机构—双框架变速控制力矩陀螺(DGV),得到基于DGV的精确的航天器姿态动力学方程,分析其力矩放大效应和奇异性。基于Lyapunov稳定性理论设计了航天器姿态跟踪的非线性反馈控制律及基于速度和加速度的操纵律。仿真结果表明,一个DGV即能有效地完成航天器三维的姿态控制。
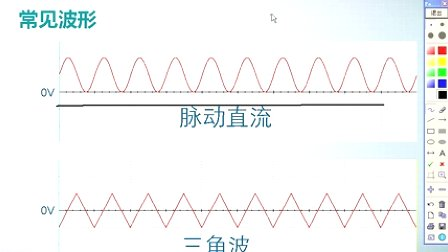
一周搞定系列之模电_第3讲_电容、三极管、场效应管介绍
深入浅出玩转STC15单片机-第03讲_如何学习STC15单片机
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
许友志电子电路基础视频教程01_基本概念
教你使用电烙铁进行锡焊(焊锡教程)
一周搞定系列之模电_第1讲_视频介绍及Multisim下载安装
MATLAB教学视频第11章 Simulink仿真
张飞电子工程师培训视频教程
x