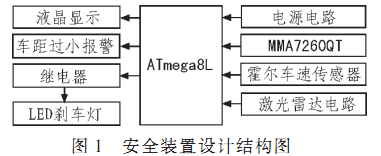
针对目前汽车追尾事件频发问题,提出一种防汽车车前和车后追尾的安全装置设计。该设计以高性能、低功耗的8位AVR微处理器ATmega8L为核心,结合霍尔式车速传感器、激光雷达测距装置和MMA7260QT加速度传感器,能够兼顾车前和车后,摒弃以往设计中只考虑车前或车后单一性缺点,尤其适用于高速、夜晚或新手行车。
王健带你征服汽车CAN总线—第一讲:CAN总线原理
行车记录仪双镜头可将前后两个方向录制为一个视频文件
王健带你征服汽车CAN总线—第三讲:怎样用程序控制CAN总线
王健带你征服汽车CAN总线—第二讲:CAN总线控制器
基于DSP和双向Z源逆变器的纯电动汽车电机驱动与车辆控制系统
TI汽车技术
汽车电子学基础(同济大学)第04讲—车载网络系统
ARM平台下基于SIM908车载定位监控系统
Cocktail
x