基于ARM的吸尘机器人硬件电路设计.pdf
时间:03-07 15:56
查看:1293次
下载:162次
简介:
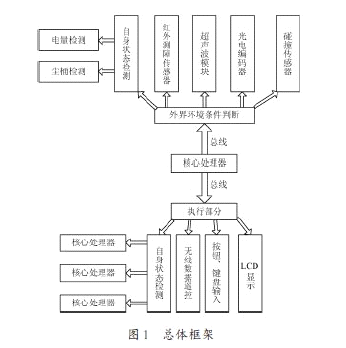
设计一款具有自主吸尘功能并且结构简单、成本低的小型家用吸尘机器人,实现了室内半自动或者全自动的清洁工作,从一定程度上代替人们做繁杂的家务。在硬件选型上,以ARMCortex-M3处理器为核心,设计了专门的电机驱动板,通过光电编码反馈电路实现行走模块的闭环控制。主要对传感器模块进行开发,通过合理布置传感器,采用多种传感器融合,使超声波和红外光电传感器协调工作实现对远近距离障碍物的精确检测,提高了对障碍物的准确识别,能够实现自主避障吸尘。