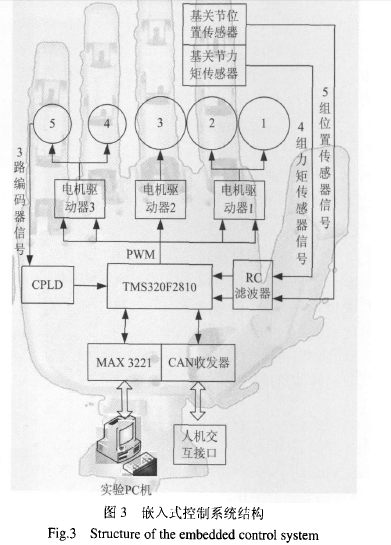
为一种能够实现5指独立动作以及具备人机交互能力的多自由度仿生假手设计了手部嵌入式控制系统,该系统由传感器系统和运动控制系统构成,集成于假手机体内部,通过通信总线与上层控制器交换信息,传感器系统包括3种类型,共12个传感器,可为假手自主抓取以及人机交互中的感觉反馈提供数据,运动控制系统用于控制,驱动各手指动作,此外,本文以基于位置的阻抗控制为底层,以动作预构形为上层设计了分层控制策略,实验表明,该嵌入式控制系统和分层控制策略使假手实现了自助抓取功能,提高了抓取的柔顺性、稳定性和适应性。
ASR M08-A语音识别控制模块 语音控制单片机
零基础学会ARM嵌入式开发-培训视频-第二讲_刘凯老师ARM视频教程
嵌入式linux在智能手机开发中的应用--华清远见
基于无线网络的机器人安防项目--华清远见嵌入式
嵌入式Linux典型案例——无人航空视频拍摄--华清远见
华清远见视频Andriod嵌入式和3G技术在物联网中的应用
ARM嵌入式Linux系统开发37_字符设备驱动开发实例
CAN总线通讯(自制开发板)收发演示
x