本设计的智能车系统以推荐的 MC9S12XS128 微控制器为核心控制单元,采用两个 CCD 对路况信息进行采集,在对图像进行二值化的基础上,进行赛道识别和预判,并进行汽车导航;使用 PID+bangbang 控制算法调节驱动电机的转速和模糊 PD 算法控制智能车转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。
初级反汇编视频教程08-算法反汇编(啊冲主讲)
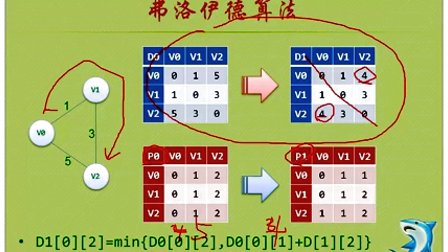
65最短路径(弗洛伊德算法)
68关键路径(代码讲解)
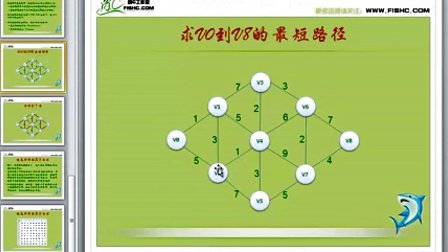
最短路径(迪杰斯特拉算法)
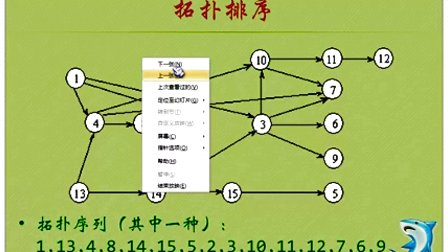
66拓扑排序
60马踏棋盘算法(骑士周游问题)
44二叉树2
清华IT学习C语言第一讲程序设计与算法(宏图赖国荣)
Cocktail
x