本设计主要通过利用惯性测量单元(IMU)姿态获取技术、PID电机控制算法、2.4G无线遥控通信技术和高速空心杯直流电机驱动技术来实现简易的四轴方案。整个系统的设计包括飞控部分和遥控部分,飞控部分采用机架和控制核心部分一体设计增加系统稳定性,遥控部分采用模拟摇杆操作输入使操作体验极佳,两部分之间的通信采用2.4G无线模块保证数据稳定传输。
第1集--STM32视频整体介绍--刘凯老师STM32培训视频
1_K60入门介绍—专辑:《野火攻城略地之一天攻破K60》
《原子教你玩STM32》系列视频第3讲—STM32基础知识入门
第7集--STM32开发环境搭建--刘凯老师STM32培训视频
点西教育STM32嵌入式视频教程-SPI
《振南电子STM32视频教程》第十二讲:SMT32中的ADC操作
第4集--STM32应用案例--刘凯老师STM32培训视频
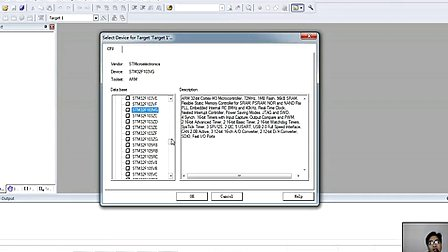
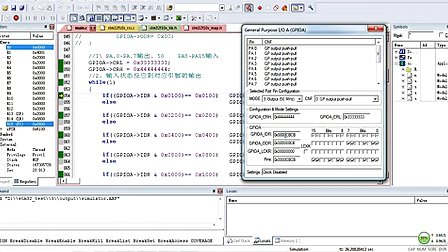
第12集--GPIO原理与操作(三)--刘凯老师STM32培训视频
Cocktail
x