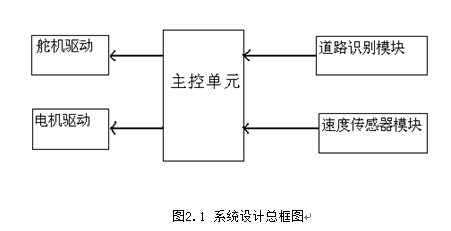
在本次比赛中,本组使用大赛组委会统一提供的竞赛车模,采用飞思卡尔16 位微控制器MC9S12XS128作为核心控制单元,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等,最终实现一套能够自主识别路线,并且可以实时输出车体状态的智能车控制硬件系统。
本文主要对车模整体设计思路,硬件与软件设计及车模的装配调试过程作简要的说明。
由于全国大学生飞思卡尔智能车大赛已举办过六届,所以前六届的比赛模式成为了本次智能车竞赛的主要参考对象。车模竞赛的赛道是一个具有特定几何尺寸约束、磨擦系数及光学特性的白底面板,其两边贴有对可见光及不可见光均有较强吸收特性的黑色条带,宽度为2.5cm。智能车通过实时对自身运动速度及方向等进行调整来“沿”赛道运动。运动策略的制定主要是依靠对传感器得到的道路及行驶信息进行采集、分析、决策、执行四个步骤来进行的。