2 车体的转弯控制
2.1 车体定位参数计算
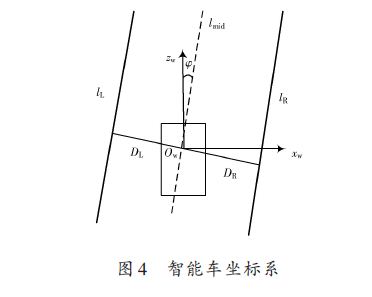
环境特征点投影到车体坐标系下表示后,即为所有的环境坐标均统一在世界坐标系下的表示。如图4所示,其中小车前进方向为zw 轴,xw 水平垂直于zw,方向向右,其交点为原点Ow.直线为lmid 为道路中间线,lmid与zw 的夹角为φ,即为车辆的偏航角。点Ow 到左车道线lL 的距离为DL,到右车道线lR 的距离为DR,可行驶区域的道路宽度为w = DL + DR.
2.2 弯道控制策略
2.2.1 控制策略
机器人的底层运动控制是非常重要的一个环节,机器人运动控制的好坏直接决定了能否有效执行决策意图,准确无误地沿着预定轨迹行进,完成导航任务。传统的定位控制中,PI、PID是广泛采用的控制方法,这些方法比较成熟,但却具有一定的局限性。对被控系统的参数变化比较敏感,难以克服系统中非线性因素的影响。本文采用BP神经网络控制器在行使过程中经学习对网络进行训练,以适应当前的环境路况来调整车的左右轮速控制量。智能车左右轮速的大小,和车体偏离道路中间线lmid 的距离d 和车运动时方向偏离中间线的角度φ 有关。小车控制输入为d,φ,输出为VL,VR .
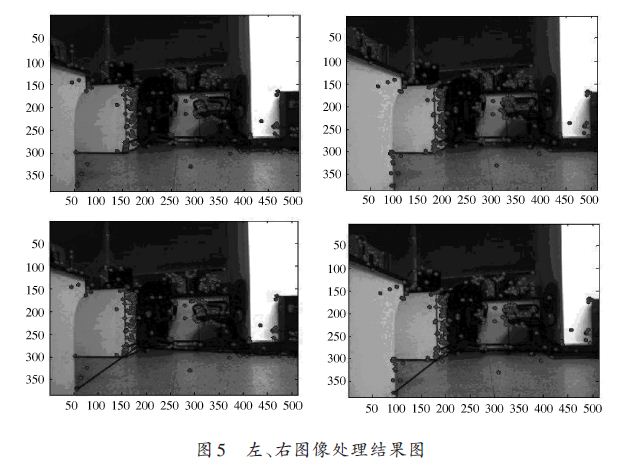
基于双目立体视觉获取得到的三维信息,即为经左右图像SIFT 特征点匹配,在摄像头坐标系中获取前景环境中各关键点的坐标信息。选取关键点中与机器人基坐标系原点高度靠近的点,并且该点的个数需大于3,之后,采用最小二乘法拟合可得行驶区域的边界直线,即确定了车体定位参数中左、右车道线lL、lR.直线与图像右边界存在交点,即可判断出弯道转向。同时,拟合确定的左车道线与图像下边缘的交点Pl0 为第一个控制点;以图像右边界与拟合直线的交点处为第二个控制点Pln.图5表示为前景环境中对特征点的匹配结果图和判断可行驶区域。
对序列图像进行实时处理时,由于摄像机采集系统速度为30 帧/s,车速在不超过33 cm/s的情况下,采集一帧图像智能车向前行驶约小于1 cm,连续采集的两帧图像中所判断的车道左右车道线和弯道方向偏差不会太大。
2.2.2 控制仿真实验
实验采用BP神经网络作为控制对偏离角φ 进行仿真实验。在Simulink环境下搭建的系统模型中BP神经网络的搭建如图6所示。U 为经由视觉信息得到的偏航角φ 作为系统输入量,输出Y 为小车质心速度V.小车左、右轮速可在判断弯道转向的前提下,由两轮速差VD 经计算得出。若如图5所示,弯道转向向右:
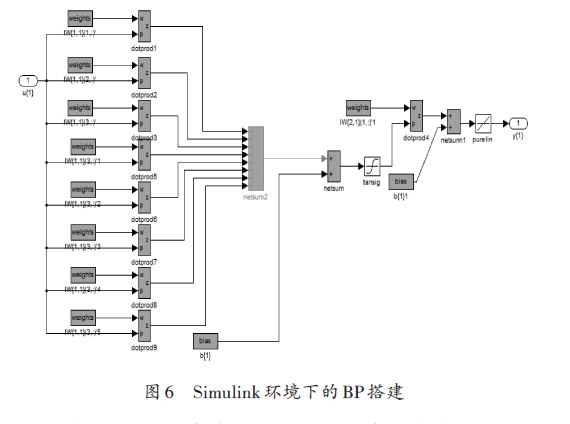
利用Simulink库中Signal Builder产生变化的Signal仿真实际环境中视觉系统得到的当前车体的偏移量。
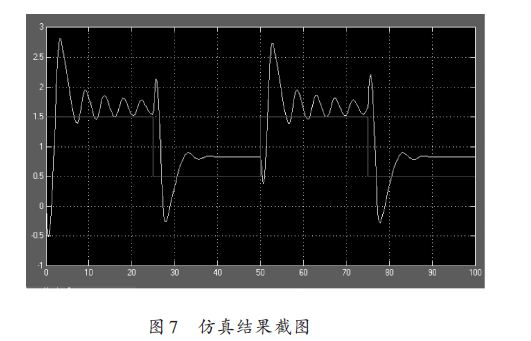
小车经左右轮差速转弯运动中质心位置实际偏转角度作为网络的输入,经训练学习反馈回系统的控制输入端。图7为控制仿真结果图,由图示可知该方法基本完成了对信号的控制跟踪,由此说明了利用双目立体视觉所获得的信息,并采用BP网络自学习对道路的变化可适用于不同弯道的道路,避免了传统PID控制方法因弯道曲率变化使得小车转弯控制失败。
3 结论
借助机器视觉系统判断小车可行驶区域,同时还可清晰地判断出弯曲线路的走向,避免了弯道方向的复杂判别方法,且该方法普遍适用于不同的道路环境,特别是非结构化的道路环境,也增强了算法的实用性和鲁棒性。但目前对双目摄像机进行精确匹配和标定仍然是个技术难题;神经网络训练方法在选取训练样本数据和精确定位车辆位置方面也比较困难,这将是进一步研究的主要关键问题。