智能LED驱动电路系统是基于风能和太阳能发电系统而改进设计的。其中,风电和光伏发电赋予了较高的优先级,在两种能源不足以供给照明时,再采用市电提供电源。由于受天气、时间、地域条件的改变,太阳能和风力资源有着不同的分布,为达到最大的风能光能利用率,采用了风光互补系统,并进行MPPT控制策略改进能源输入方案。单片机控制系统可对多路电源输入进行控制,按一定的优化方案执行对驱动电路供电。因为未采用单一能源的电力供应,为使风力发电和太阳能发电达到最大功率,MPPT控制策略扮演了重要角色。文中将综合太阳能电池板和风力发电机组的特点,分析它们的输出功率特性,以优化的风光电源对蓄电池的充电过程。在单片机智能控制系统的控制下,建立一个合理的解决方案,提供一个恒流电源以满足项目设计要求。
1 多路输入驱动LED基本方案
LED智能驱动电路系统的结构图如图1和图2所示。系统由负载、控制器、驱动电路、风力发动机、太阳能电池板、蓄电池和市电组成。

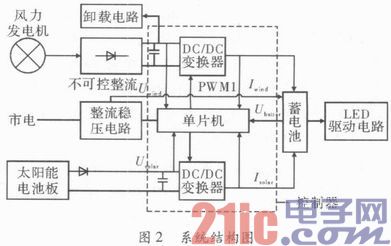
多路输入就是以市电、太阳能电池板和蓄电池作为电源动力,在实际工况中经常遇到,因为市电下很多路灯的工作情况不太稳定或者断电,这样需要照明时经常停电影响交通,这时可以通过太阳能或蓄电池进行供电,即在驱动电路里面加入选择判断电路组成多输入控制选择器。同时利用MPPT控制方式,实现最大限度的能源利用。通过对风机发电和光伏发电的控制调节,若发电电能未能供给所有电气负载时,风光互补控制器将传送给负载蓄电池电能。反之,控制器控制电路直接供给负载电能,并将剩余电能充电至蓄电池内。同时控制器保护蓄电池,使其工作在合理的电压区域内,确保蓄电池安全稳定的工作。
2 MPPT控制方案
2.1 风力发电特性原理
由流体力学中气流动能公式可以得出采用气流所具风能的大小同通过的面积、气流密度以及气流的速度成正比关系
![]()
由于风力发电机在发电风能利用率的局限性,无法做到自然风能的全部利用,所以在计算风机实际有用功率输出时需要考虑留在尾流中未利用的动能,基本公式为
![]()
上式,一般情况下Cp<0.593,其表示风力发电机的实际风能利用系数,可由贝兹(Betz)极限理论得到。风能的利用系数Cp与风力机的叶尖速比有关,叶尖速比一般用λ来表示,由风力机叶尖旋转的圆周速度和风速的比值来确定
![]()
图3给出了风能的利用系数和叶尖速比的曲线关系,是风力机的基本特性之一。
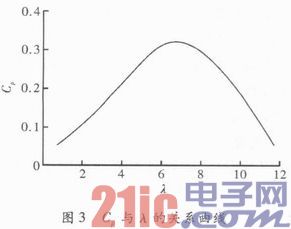
在λ处于某一特定值λ0时,就定浆矩风机而言,Cp达到最大并且风力机具有最大机械功率的输出,最佳叶尖速比用λm表示。因自然风具有不定随时变化的特性,这会使得Cp在大多数情况下不在最大工作点上,此时,风机的效率经常处在较低水平。对于这个问题,处理时需要控制风力发电机的运行速度,在一个较大的风速范围内,尽可能使风能的利用系数在最大值附近运行,且叶尖速比λ达到最为优化的叶尖速比,以实现风电转换最高效率的跟踪。
2.2 太阳能电池板特性
太阳能电池的功率特性非线性化较为明显,容易被外界因素影响。不同日照下表现出的电压/电流和电压/功率特性,如图4和图5所示。

2.3 变步长扰动最大功率点搜索控制
通过分析风力发电机的输出特性,可采用3种方式确定其最大功率点:扰动搜索其最大功率点、控制功率信号、控制叶尖速比。因为要借用风速计,使得叶尖速比控制成本较高,它主要应用于大型风机控制。为控制功率信号,需要得到风力发电机的最大功率负载曲线。采用最大功率点扰动搜索控制较为简便。而太阳能MPPT的控制有恒定电压控制法、最大功率点的观察扰动法、导纳增量法。
综合考虑太阳能和风力发电机MPPT控制功能,本项目使用改变步长搜索扰动方法控制最大功率点,MPPT控制的关键是如何使最大充电功率电池电压平稳,同时电池充电和发电部分功率相等。检测电池的充电电流以及电压,能够计算得到此时的电能利用率。
当系统运行时,控制信号起始基准功率为Pa,其占空比为x,输入一个扰动△x,Pb为检测扰动后的功率。当Pb>Pa时,证明扰动方向无误,保持同方向施加扰动已搜寻最大功率点;反之,反方向扰动。双向扰动之后,判断Pb和Pa,若检测扰动后的功率Pb小于等于起始基准功率Pa,继续减小扰动幅度,并再次进行双向搜索,当扰动△x
2.4 蓄电池充电控制优化
合理的蓄电池充放电,不仅可以延长电池寿命,而且能提升系统的稳定性。文中使用了3级充电控制的12 V铅酸蓄电池。在蓄电池的初始充电,即利用最大功率点跟踪控制充电阶段,此时电池电压较小,一个大的MPPT控制被使用。当充电电流大于蓄电池的最大充电电流时,就不再使用最大功率点跟踪最大电流充电。一旦蓄电池的最大充电功率比风力发电机和太阳能电池提供的功率大时,打开卸荷回路,使蓄电池的充电电流始终小于最大充电电流。
在充电过程中,蓄电池充电到各个阶段,可以不使用最大功率充电,放弃上述MPPT控制,采用电压环控制。此阶段控制参考对象选定为降压/升压型转换器的输出电压,从而使蓄电池在定压条件下充电。此时,充电电流逐渐变小。当充电电流减小到1 A时,蓄电池进入浮充阶段。采用输出电压恒定的控制转换器,使蓄电池以较小的放电电流来补偿功率损耗。利用这个次优控制,可使能源得到充分利用,且在不损害蓄电池的前提下,有效地提高电池的充电效率。
3 LED驱动电路设计
该驱动电路是恒流驱动电源,专为T10 LED灯设计,可驱动400余盏白色光LED灯或600余盏的红黄色LED灯管。产品采用特殊的控制开关方式以及非隔离的外观设计,使其具有高效率,节约能源,绿色环保等方面的优势。经过研究和物理测量电路,驱动电路具有以下特点:工作频率50~60 Hz;功率24 W;宽输入电压AC 110 V~265 V/50~60 Hz,输出电流0.24 A,输出电压36 V≤UOUT≤0.6Uin;体积175mm× 18 mm×11 mm;直流50~80 V。确保LED使用安全稳定,完全控制LED电流,同时LED光衰减弱,恒流精度高,开路保护功能,电磁兼容性较好。高效率、低功耗、稳定性好的开关控制芯片,使产品拥有绿色节能的特性。
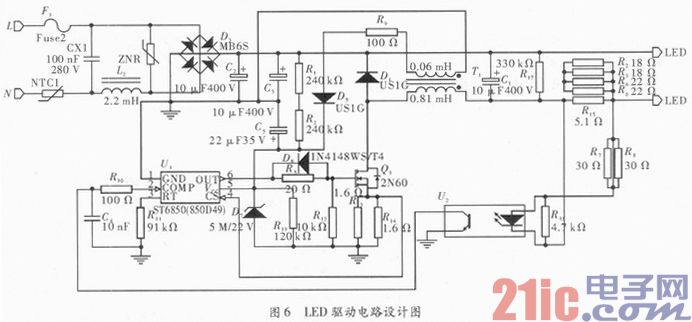
电流采用交流电接入,通过桥式整流器,电流直接被送到LED负载的正极,然后通过负极经变压器回到晶体管Q1,最后又通过桥式整流器回到交流的阴极。这就是该电路有负载时的主要回路。当没有负载时R17就充当了保护电路的负载,保证电路不会短路。C1在这里起到了滤波和以充放电的形式来平衡负载LED两端电压的作用。D1为蓄流二极管,保证变压器正常工作。电路图下半部分,主要由两个芯片和Q1过程的反馈调节电路。Q1会根据U1发出的高速频率快速地开关电路,对变压器发出高频电流,从而使该电路输出高频电流。反馈控制:当负载LED电流过载时,电流会通过R7和R8到达U2,使U2右边的二极管发热,使U2左边的电压降低,同时反馈到U1,即可调节电压和频率控制电路,从而使驱动电路输出恒定电流。
4 结束语
文中采用多路输入的方式,经控制器智能操控后对大功率的LED灯提供电能。同时还考虑了在风光互补供电系统中常用的MPPT控制策略,使用MPPT策略以获得风光发电的最大功率值,对蓄电池充电进行分段优化,提高能源利用率,得以实现节能环保的目的。