摘要:ITS(即智能交通系统)为目前交通运输行业的研究与运用热点.智能交通系统融合人工智能.图形处理以及计算机技术等多种先进技术.它在信息处理等某些方面有着非常强大的优势,今后的发展潜力是不可估量的.而作为智能交通系统(即ITS)主要组成部分的电子车辆检测技术,和传统的汽车检测方法相比较,有着无法代替的优点,不过因为电子测量检测技术受气候以及自然环境等因素的影响非常大,其技术比较复杂,仍然需要不断加以研发改进.
1 ITS(即智能交通系统)概述
1.1 ITS 的内容
1.1.1 车辆控制系统
此系统为辅助驾驶人或者完全取代驾驶人对车辆进行驾驶,此系统主要是在汽车的前端或者两旁设置了雷达探测仪或者红外探测器,此种探测仪能够准时.合理的判别出运动中的车辆和车辆以外的物体之间的距离,当汽车遇到紧急情况时,汽车喇叭就会发出警报,同时有些车辆还设置是自动刹车避让功能,并且依照道路的状况况自动调整行车速度.比如在高速公路上路况较好时,汽车速度回自动上升,而在郊区路况较差时,其系统就会自动调低车速.
1.1.2 运营车辆调度管理系统
此系统是在汽车上按照或者设置有车载电脑与GPS(即全球定位系统),该设备利用卫星信号能够与汽车之外实现联网.当汽车与“外界”有效实现联网之后,汽车管理中心或者交通局等部门就可以和汽车驾驶员随时随地进行“通信”,这样不但能够保障了汽车驾驶员的安全,同时也提升出租汽车.商业车辆等运营系统.
1.1.3 旅游信息系统
所谓的旅游管理系统,是专门为外出旅游人员研制出的一种系统,该系统能够随时随地(在汽车接收器能收到信号的情况下)将各种信息提供给汽车驾驶人员.旅游信息系统所提供数据信息的媒介非常多.外出旅游者随时随地通过多种多样的方式,在汽车上的信息系统中来查找自己需要的信息.
1.2 ITS 的发展历程以及研究现状
ITS 的发展为上个世纪七十年代之后逐渐发展起来的.在那时日.欧以及美等工业较为发达的国家此种交通系统,当时主要的目的是出于提升效率以及节约能源的考虑.而伴随着世界科技的快速发展,信息的采集.交通的监管以及信息的传输等系统所发挥的作用越来越大,尤其是在交通的管理中.不过此类技术只是单纯对汽车或者道路进行科学化管理,其系统性较弱.功能单一以及范围小.
现阶段,智能交通系统已经不再限于解决交通污染.交通拥堵或者是交通事等局部性问题,同时它还是解决我国资源供应紧张.提升中国在世界上的战斗力的重要手段.经过三十多年的发展,智能交通系统的研发运用已经取得了非常大的成果.日.美以及欧为世界上经济与科技发展水平非常高的国家,同时也是世界上智能交通系统研发运用的最先进的国家.
2 关于智能交通系统中汽车电子检测技术的相关研究
2.1 运动目标的提取方法
2.1.1 基于光流场的方法
此概念是上个世纪八十年代由Stunk 与Horn 首次提出,就空间而言,运动能够用运动场景来描述,物体的运动常常是以借助图形序列中表现出不同的图形灰度分布的不相同体现,所以空间中的运动场在转移至视频中就表示成光流场.光流场能够有效的反应出图形上所有点的灰度的转换走势,能够看成为有灰度的像素点与图形平面中运动而出现的瞬时速度场,亦为一种对真实的运动场的相似估计.而光流计算通常基于以下两个假设上:首先,所有被观测物体其亮度不会随着时间的变化而变化;其次图像平面的临近点的运动手段相类似,也就是速度平滑约束.依照以上信息我们知道,光流非常依赖于场景中其空间内的连续性和图像所呈现出来亮度其运动信息.同时,光流说到底还是连续时空域建模,在完全除去空间连续性之外,它还需要相连的两幅图像其时间间隔足够短.
帧差法的优点为对环境的光线的变化并不敏感,抵抗干扰能力较强,能很好的使用动态环境,其实时性较好,处理的速度也非常快.但是帧差法也会有自身存在的缺点,比如很难检测出非动态的车辆,同时相邻帧的时间距离的长短和车辆这两种结果因素对检测的结果有着非常大的影响,同时也有可能会出现前帧目标与后帧目标没有完全吻合或者前后两帧的变化非常小的现象,以此导致检测的失败.并且,假若被检测运动物体它的表面存在着大面积的区域较为均匀时候,对于相邻的帧差而言,会出现孔洞现象,这样对检测结果有着一定的影响.
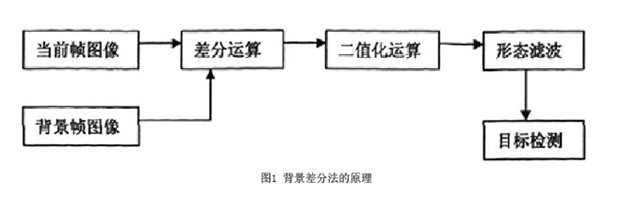
2.1.2 背景差分法
背景差分法非常简便,准确的较高,且速度非常快,不过此种算法的优劣对背景的选取有很大的依赖,我们知道,交通场景的有效检测对于外界环境的依赖非常高,比如太阳光的照射角度如果经常性发生变化或者太阳光的强度改变以及大风大雨沙尘暴等天气,均会对检测的效果产生直接影响,严重的时候甚至不符合实际情况,会出现假象.所以不能单纯只用一个检测系统来检测某一区域所有的运动目标.
如图1.
3 总结和展望
电子检测车辆为智能交通系统中基于图像是汽车检测技术的基础,于实施智能交通系统有关技术的研究与探索时,本文主要实施了图像的处理以及图像的分析等相关知识的积累与学习,并以此为奠基,对我国电子检测车辆技术中一些现有的方案与算法实施了一定的研究分析,且与实际相结合,提出了一些新的方法.对经常使用的三种运动目标的提取算法分析对比,就背景差分法此两大最为关键的问题:背景的更新与背景的建模,分析且使用了精确性比较高的统计平均法的背景建模,和均值法相比更为准确,而和模型法相比则计算更为简单,可操作性更强;而对于背景更新的问题,则提出了使用像素分类的有针对性的图像背景更新的新的方法,这样能有效的减少背景和前景的融合问题.
尽管此次研究所提出且使用的算法可以达到检测汽车的目的,不过因为阈值的选取以及研究中存在的一些误差,本研究中依旧存在着噪声以及准确都不太高的问题.比如怎样使得算法有着更高的准确性为下一步需要研究的问题.文章尽管对车辆与阴影的分割实施了一定的分析,不过对于阴影导致的汽车粘连问题和汽车的遮挡与重叠问题还没有更加深入的探索.假若出现较大面积的遮挡或者粘连.本文的方法能够继续使用需要进一步分析.
4 结束语
智能交通系统其前身为智能车辆道路系统(即IntelligentVehicle highway system,英文缩写为IVHS),智能交通系统(即ITS)把目前领先的IT 技术.电子传感技术.电脑处理技术和数据通讯传输技术等有效地结合起来,并应用在我国这个庞大的交通运输管理系统中,从而构建的一种能够综合性发挥作用的高效率.实时检测以及准确度较高的综合运输与管理系统.本文首先对智能交通系统的发展概述等进行了分析研究,之后探讨了智能交通系统中的汽车电子检测技术,文章最后对智能交通系统做出了总结与展望,希望对相关工作者能有所帮助.






















