随着汽车行业的发展,汽车对人们的生活与工作产生了很大的影响,同时对于汽车使用中的安全问题也就成了我们日常生活中必须关注的部分。其中,汽车的侧滑是指某一轴的车轮或两轴的车轮出现横向移动,这样的情况是很危险的,因此需要对其进行检测以便调整。为此,我们实现了对侧滑台传感器数据的采集,通过运放电路将传感器传出的电压从±2.5 V调整为0~5 V,在通过ATmega16内置的AD转换, 最终通过AVR单片机ATmega16对数据进行分析来实现对汽车侧滑量的检测。
1 检测装置的组成和基本原理 本装置主要由汽车侧滑试验台、位移传感器、AVR单片机和显示模块组成,其连接方式如图1所示。

检测汽车的侧滑时时,使汽车前轮在汽车侧滑试验台的检测滑板上通过,汽车行驶过程中会使得检测滑板向内或向外移动。这个移动量就是由于汽车的侧滑照成的。我们可以通过位移传感器将移动的量值传出来,经过ATmega16单片机的处理之后就可以将数据进行显示。检测滑板的宽度长度为1 M,滑板位移量的量级为mm,通过单片机的处理,可将汽车的侧滑量转变为以M/kM的单位数值进行显示。汽车侧滑的结果的绝对值如果大于5 M/kM则为不合格,否则为合格。
2 AVR单片机控制模块设计 整个控制模块包括传感器供电模块、传感器信号电压抬升模块和数码管显示控制模块组成。每个模块都有其特定的功能。 2.1 传感器供电模块 传感器最主要的部分是一个电路的桥组成的,其输出和加在桥两侧的电压以及一个可变电阻都有关系。其中可变电阻是在传感器确定后就已经确定的,没办法改变。而电压则是通过控制箱加在传感器上的,为了使传感器的输出电压比较稳定,则需要在传感器供电模块进行相应的设计,使得供电电压更稳定。其工作原理如图2所示。
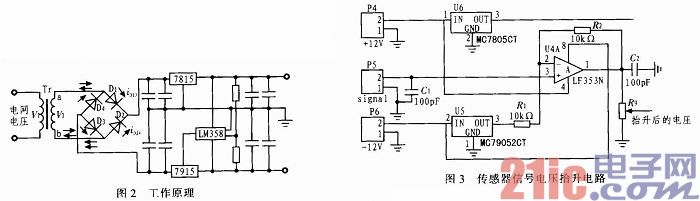
开关电源给出的电压经过整流桥后,再经过量级滤波后再接7815和7915的输入端。后级为0.1μF的电容作用是通过充放电原理把交流成分去掉。7815和7915的输出端经两个33 k高精度电阻分压后接放大器LM358的反相输入端,LM358的同相输入端接地,放大器LM358的输出端接7915的公共端。R17,R18为高精度电阻,7815,7915的输出端又经过由两个47 μF/25 V的电解电容滤掉其交流成分,最后经过1~2个0.1 pF的滤波电容虑掉其交流成分,则输出端为稳定的直流+15 V和-15 V电压。可以将其加在传感器的激励端,使传感器的输出更加稳定。
2.2 传感器信号电压抬升模块 本侧滑试验台使用的传感器传出的电压值范围是-2.5~2.5 V,而Atmega16的内置AD可采集的电压为0~5 V,所以需要将这个电压值抬升,这样才可以采集到正确的电压值。电压的抬升电路如图3所示。
在通过运放进行抬升电压的时候,两端的电压是通过7805,7905产生的,因此,电压都相对稳定,所以抬升以后的电压也是比较稳定的,输入和输出电压的关系为:
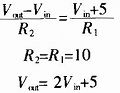
可以看出,调整后的电压为原电压的两倍加上5 V,即:原电压为-2.5~2.5 V,则调整后的电压为0~10 V,且变化为线性关系。之后再通过电位计对电压进行调整,使其符合0~5 V的标准,且是线性相关的,这样就可以将抬升后的电压直接接到AD转换的端口上,通过AD转换就可以让AVR单片机得到现在位移的数据,从而达到检测的目的。
2.3 数码管显示控制模块 对数码管进行控制,需要分别对数码管的位选和段选进行控制,也就是说需要两路信号来进行控制。同时,ATmega16的输出的电压为5 V,而数码管的电压应为1.8 V左右,所以在单片机的输出和数码管之间应接一个锁存器,即可以实现降压,又可以将一些信号进行锁存,使得一些数值可长时间显示。数码管的控制方式如图4所示,其中P1为片选的控制输出,P2为位选的控制输出。而且图4同时给出了信号输入
ATmege16和一些提示信号的输出。
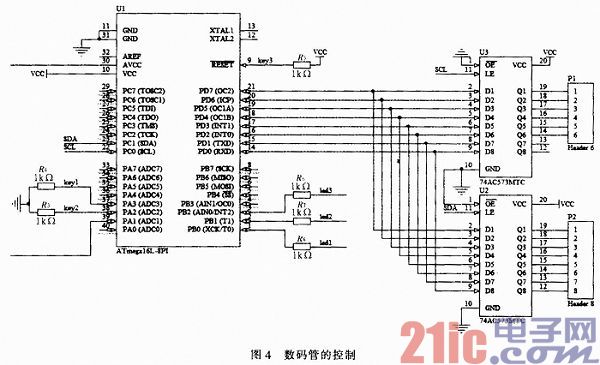
对数码管的控制由单片机完成,显示需要显示的内容由单片机对每个数码管的显示进行循环刷新,这样就可以让数码管显示出的数据为连续的、可见的。达到对检测结果显示的目的。 2.4 整体模块 单片机模块是将相应的模块连接在一起。然后需要一些LED灯的报警提示,LED灯的连接方法在图4中也相应的给出。单片机和传感器的连接为传感器供电模块提供传感器的激励信号,传感器信号电压抬升模块接收传感器的信号,并将其抬升至0~5 V,然后提供给ATmega16。
3 软件部分设计 本系统需要软件对其AD转换的结果进行分析并显示,而且是需要采集滑动板在汽车行驶过程中的最大值,以确定汽车的侧滑量,而且需要对得出的数据进行对应的转换之后再显示。软件的流程图如图5所示。
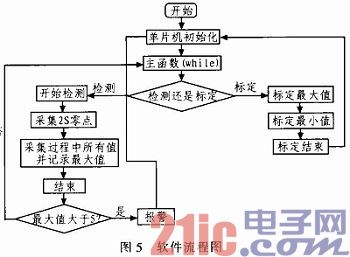
其中标定时有最大值标定和最小值标定。在标定最大值时,需要将滑动板向外移动1 cm,并由单片机记录传感器此时相应的电压值。标定最小值时,需要将滑动板向内移动1 cm,并由单片机记录传感器相应的电压值。有了这两个值,并且知道滑动板左有各移动1 cm,即两个电压对应的滑动板距离差为2 cm。再根据传感器由滑动板的移动而引起的电压变化为线性的,我们就可以确定传感器移动距离与电压变化的关系。在之后的检测中就可以通过电压的变化值来确定滑动板移动的距离。 在检测时,刚开始对传感器的电压进行采集200次,并进行平均,这个值作为本次检测的零点电压值。此后进行采集5次平均,目的是确保可采集更多的数据,将最大电压值得出。采集过程中,得到的每一个电压值都与零点电压值进行比较,并将两个电压差值最大的点缓存下来。当点击结束检测的时候,缓存的电压值与零点电压值的差为此次测量得出的结果的反映。在经过电压与滑动板位移的关系就可以得出本次测量过程中汽车在滑动板上走过后,滑动板的最大位移量。最后经过单位的转化就得出了此次检测的侧滑量。侧滑量通过数码管进行显示。如果侧滑量大于5 m/km或小于-5 m/km,则汽车侧滑不合格,单片机控制蜂鸣器报警。之后返回到选择阶段。
4 检测结果 设计安装完毕之后,首先对本系统进行标定,之后进行检测测试。已知滑动板长为1 m,即滑动板每移动1 mm则最终侧滑量为1 m/km。表1为检测结果。
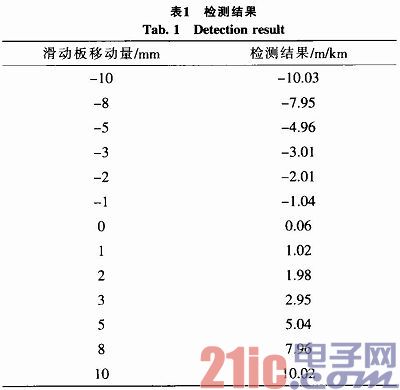
由表1可知,检测结果的误差均不超过0.1。国家对侧滑检测标准的误差规定为不超过0.2。而且此数据为车间测试结果。车间的噪声干扰较大,但检测结果依然准确。所以此系统可以实用。
5 结束语 本侧滑检测系统运行稳定,可以准确的采集传感器的电压并得出测量过程中准确的侧滑值。且本系统采用ATmega16,功耗低,效率高,集成度高,节约空间。在信号采集的过程中,使用了多次采集然后平均的方法,由于信号电压一般是带有毛刺的,所以多次采集后的平均有较大可能将电压的毛刺去掉。此外本系统最好的地方是使用了很稳定的正负电源,使得给传感器的信号电压也很稳定。再加上之后对传感器信号电压的一些滤波处理,这样给ATmega16进行处理的信号电压就很稳定,所以得出的结果就很准确。由测试结果也可以知道,本设计可以在实际中进行应用。