一般常见的遥控装置,都属于开关型的,即只能对被控对象的电源通断进行控制。即便加上相应的机械装置,也只能工作在两个极限位置。这在某些需要使被控对象在整个动作范围内的任意位置都能按操比值者的意愿随意动作并精确定位的场合(例如某些机械手的动作),就难以进行控制。而比例遥控则可以实现上述的控制,它使被控对象的动作完全与操纵杆的动作同步并成比例变化。若将其用于电动机的控制,则不仅能控制其通、断,而且能在很宽的范围内对电动机进行调整控制(对直流电动机而言)。同时,经过编码,比例遥控还可方便地实现多路遥控。

小功率直流电动机特别是永磁直流电动机在各种自控系统中的应用越来越广泛。若需对其调速,传统的方法是用电阻调节,其缺点是效率低,转矩受影响等等。较先进的方法是采用脉宽调速,这种脉宽调速方法具有调速范围宽、转矩大、效率高的优点,缺点是不太容易实现遥控。笔者将比例遥控与脉宽调整有机结合起来设计了一套多路比例遥控直流电机脉宽调整电路。利用该电路可对几路小功率直流电动机的转速进行按操纵杆动作成比例变化的调整控制,各路调整可同时进行,互不干扰。下面介绍其电路及工作原理。
1 遥控编码发送电路
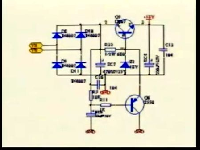
本装置采用时分制脉冲调宽编码方式。其编码信号按帧传送。每一帧由同步脉冲及各通道的控制脉冲组成(本电路设计为四个通道,可进行四路控制)。帧周期为20ms。图1是该比例遥控宽调速电路的原理图。它由两块六施密特反相器集成电路CD40106组成。其中Icla接成多谐振荡器,用来产生帧同步信号。Iclb与Iclc,Icld与Icle,IC2a与IC2b,IC2c与IC2d分别构成四级下降沿触发的单稳电路,用来产生四个通道的调宽脉冲。RW1~RW4是四个通道的脉宽调节器,它们直接与遥控操纵杆相连。当调节操纵杆时,这些脉宽调节器可使对应通道的控制脉冲宽度在1.5±0.5ms范围内变化,通过接收端译码及伺服电路可使被控对象产生与操纵杆同步成比例的动作。IC2e与IC2f构成整形与定宽单稳电路。晶体管T1~T3构成放大及发送电路。
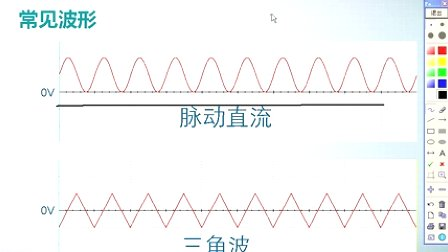
该电路在工作时,首先由Icla产生周期为20ms的帧同步方波(波形见图2A),并由C3送放第一级单稳,其一跳沿使第一级单稳被触发,从而产生第一路控制脉(波形见图2B),第一级脉冲的下跳沿又触发第二级单稳以产生第二路控制脉冲(波形见图2C),依次类推,第三、第四单稳产生第三、四路控制脉冲(波形图见图2D、2E)。每路脉冲宽度取决于操纵杆的位置(实质上是Rw1~Rw4的阻值)。同时,同步脉冲与四路控制脉冲的下跳沿经C2R2、C5R4、C8R7、C11R10、C14R13五组的微分电路及D1~D5组成的或门后依次加到IC2b与IC2d组成的整形定宽单稳(波形见图2F)电路,再经整形后输出一列整齐的,宽度固定为0.2ms的正脉冲(见图2G)。该串脉冲的间隔宽反映了控制脉冲的宽度。也就是包含了四路控制信息。G点的脉冲经T1~T3放大后输出到控制线上来进行有线遥控。若加上相应的调整制电路也可以方便地实现无线或红外遥控。
2 接收解码电路
接收解电路的作用是将发送部分传送过来的多路控制信号分离出来并分别送往各路伺服电路以分别对各路进行控制。图3中由T1、T2、T3及IC1组成的电路即是其电路原理图。IC1为8位串行并出移位寄存器集成电路74HC164。当由控制线送来的编码脉冲经T1、T2放大整形后分成两路,一路作为移位脉冲送到IC1的8脚,另一路经D1、C1积分并经T3倒相后加入IC1的1、2脚作为同步信号。
当第一个脉冲即同步脉冲前沿到来时,IC1的1、2脚尚为高电平“1”,该“1”信号串行后使IC1的有脚变为“1”。同时此脉冲经D1向C3充电使T3迅速饱和导通,使IC1的1,2脚变为低电“0”,且由于后续脉冲的作用而使其保持在“0”电平。此后,在编码脉冲作用下,3脚的“1”信号顺次向4、5、6脚移位。编码脉冲串入以后,C3经T3发射结放电,使IC1的1、2脚恢复高电平,并为下一帧信号的解码作准备。IC1的3、4、5、6脚即是解码器的四路输出端,分别输出各路控制脉冲。74HC164最多可用于8路的解码,该电路用于四路。本接收解码电路各点的波形见图4所示。
3 伺服及脉宽调速驱动电路
由解码器输出的各路控制脉冲,需要经过伺服电路变成脉宽调速信号,然后,经驱动电路才能带动直流电动机。该部分电路的原理图见图3的右半部分,即由IC2和T4~T11等元件所组成的电路。图中只画出一个通道。
图3中的IC2是一块伺服专用集成电路SN76604,它能根据解码电路送来的控制脉冲的宽度变化(1.5+0.5ms)来进行内部电路处理,并输出占空比为10%~100%的双向脉冲电压,该脉冲经过驱动电路扩展功率后可对直流电动机进行脉宽调速。SN76604集成电路的内部框炉膛如图5所示。
工作时,由解码电路送来的1.5ms±0.5ms正向控制脉冲加到IC2的3脚后,在IC2(即SN76604)分成两路,一路解发单稳发产生一个宽度为1.5ms的比较脉冲,一路送经比较器与单稳产生的脉冲进行比较。若控制脉冲大于1.5ms,比较器输出一正向差值脉冲;若控制脉冲小于1.5ms,比较器输出一负向差值脉冲。该差值脉冲经展宽电路按比例展宽后送经双向放大电路后由11、13脚输出。最后将该IC2输出的脉冲加到驱动电路。这里采用桥式驱动电路,该驱动电路可以使电动机双向转动并且调整。由于IC2输出的脉冲是以3V为初始电平的正负双向脉冲,故设置了T4、T11控制开关晶体管。当无脉冲输出时,T4、T11均处于导通状态,而其它晶体管均截止,电动机停转。当TCSN76604的11脚输出负向脉冲时,T11截止,T7、T9、T10导通,电动机正转;当SN76604的13脚输出负向脉冲时,T4截止,T5、T6、T8导通,电动机反转;且转速随脉冲占空比变化而变化。
该套遥控调整电路特别适用于操作人员不便进入的场所内装置的远端控制。若加上相应的高频收发电路亦可进行无线或红外遥控,是一套很有使用价值的遥控调速电路。