0 引言
随着航空电子侦察技术的发展,机载测向系统以其作用范围大。侦测距离远。机动性强和可实现单机对地面目标定位等优点,能够完成地面通信电子战设备所不能完成的远距离。大区域作战任务,正越来越受到国内外关注。但是在实际工程应用中,机载测向中面临着以下几个方面的问题。
(1)机载平台可供布设天线阵列的有效空间。允许的天线阵元尺寸和数量十分有限,不能使用大基础天线阵;同时飞机结构面多为弧面,这也限制了均匀圆形阵向低频段扩展的可能。本文考虑到飞机本身的结构特点是机身横向窄纵向长,为有效利用飞机机腹的空间,提出了均匀椭圆布阵的形式,通过仿真分析了椭圆阵列孔径与波长之比对入射角度的估计性能影响。
(2)现代雷达系统,通常采用在目标雷达周围配备有源诱饵进行保护,这就要机载测向系统有高的分辨力,但是基于相位干涉仪的测向方法只能实现对单个信号的测向,而空间谱估计测向法可以实现对一个波束宽度内多个入射信号的来波方向估计,所以有效地提高空间谱估计方法在实际测向系统中的分辨力至关重要。
(3)在实际测向中天线阵列通道幅相失衡。天线阵元的互耦等会导致测向性能的下降,所以亟需采用有效的校正方法来改善测向性能。
本文重点研究前两个方面的问题。
1 机载平台测向天线阵设计
1.1 相关干涉仪测向技术
测向原理如下:在测向天线阵工作频率范围内和0~360°方向上,各按一定规律设点,同时在频率间隔和方位间隔上建立样本群,在测向时,将所得的数据和样本群进行相关运算和差值处理,以获得来波信号方向,可以实现宽频带范围内无模糊测向,对阵列的摆放形式没有特殊要求。
基于相位差拟合的相关干涉仪代价函数为:

式中:θ为观测相位差向量;θj为对应于(θ,φ)方向的相位差向量,使得ρj最大值所对应的原始相位样本值就是实际入射信号的方位。
1.2 测向天线阵设计及仿真
针对机载平台的特点,给出了椭圆天线阵列摆放示意,如图1所示。

设M个天线阵元均匀分布在一个椭圆圆周上,以几何中心为参考点,则阵列的方向向量a(θ)可表示为:

设a(θA),a(θB )是均匀椭圆阵列上的2个方向向量,则相关系数为:

仿真分析1:
设椭圆阵孔径与波长之比(d λ)分别为12和14,信号入射方向为50°,5元均匀椭圆阵的相关系数图如图2所示。
可见,相关系数的最大值在方位角50°处。从仿真图2可得如下结论:d λ越大,主瓣越窄,方位测量精度越高;去除测向模糊就是要求相关系数图的主瓣与副瓣的高度易于分辨。MUSIC算法其分辨力与阵列孔径成正比。也就是说当可利用的阵列孔径受限时,会影响到分辨力,但为了提高系统的分辨力而增大天线盘的孔径代价太大。所以要在不需要通过增大阵列的物理孔径来实现MUSIC算法的分辨力上下功夫。
2 MUSIC算法分辨能力2.1 MUSIC算法原理及分辨性能设有P个不相关窄带入射到M元远场线阵上,则阵列输出向量为:

式中:X(t)为M × 1维的阵列输出向量;A为M × P维的阵列流型,它是辐射信号入射角α和β的函数;S(t)为P × 1维的入射信号向量;N(t)为M × 1维的噪声向量。由于信号与噪声相互独立,接收数据的协方差矩阵为:

对R进行特征分解,P个大特征值对应的特征向量Us = [e1,e2 ,…,ep]张成信号子空间;M – P个小特征值对应的特征向量UN = [ep + 1,ep + 2 ,…,eM ]张成噪声子空间,两个子空间正交。在噪声子空间上投影为0的阵列流形所对应的方向就是信号的DOA,MUSIC算法通过搜索式(6)的极大值点来获得辐射信号的DOA:

仿真分析2:
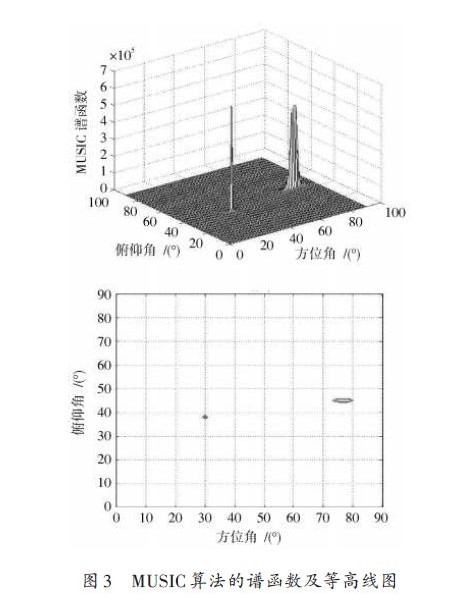
天线阵列采用均匀的5元椭圆阵,信噪比为20 dB,快拍数为1 000,取三个辐射信号(45°,75°),(45°,78°),(38°,30°),仿真结果如图3所示。
仿真分析2:
天线阵列采用均匀的5元椭圆阵,信噪比为20 dB,快拍数为1 000,取三个辐射信号(45°,75°),(45°,78°),(38°,30°),仿真结果如图3所示。

仿真分析3:
天线盘孔径对MUSIC算法分辨力的影响。天线阵列形式采用均匀的5 元椭圆阵,取两个辐射信号分别为(45°,75°),(45°,78°),即两个入射角间距为3°,依据式(7)对不同孔径与波长比(d λ)条件下的分辨能力进行仿真,如图4所示。

从图4可以看出,MUSIC算法分辨能力随天线盘孔径的增大而提高。故可以考虑通过增大天线盘孔径来提高MUSIC算法的分辨力,但天线盘的尺寸受限,不可以无限增大。鉴于四阶累积量的阵列具有扩展特性,利用它来增加天线盘的孔径,以提高阵列的分辨力。
2.2 四阶累积量2D-MUSIC
2.2.1 四阶累积量2D-MUSIC的阵列扩展特性及原理
王永良等人给出了四阶累积量特性的详细理论推导,这里不再重复阐述。如图5所示,以空间中3个天线阵元为例,对四阶累积量的阵列扩展特性进行说明。

其阵列导向矢量可以表示为:

式中:k 表示辐射信号入射角度矢量;d12和d13分别代表阵元2.3相对参考阵元1的位置矢量。
利用四阶累积量的扩展特性对图5 的阵列扩展后的导向矢量为:

由图5可以看出,空间中3个真实阵元构成的阵列经四阶累积量阵列扩展后构成了6个阵元的虚拟阵列,阵列孔径扩大1倍,然后利用扩展后的阵列对辐射信号的入射角度进行估计,以达到提高分辨力的效果。
基于四阶累积量的MUSIC算法也是利用信号子空间与噪声子空间的正交性,其空间谱函数表达式为:

通过谱峰搜索,找到P个极大值对应的角度,实现对辐射信号的二维DOA估计。
仿真分析4:
以均匀5元椭圆阵为例验证四阶累积量的MUSIC算法和MUSIC算法分辨性能,同样采用的信噪比为20 dB,快拍数为1 000,取三个辐射信号(45°,75°),(45°,80°),(38°,30°),仿真结果如图6所示。

由图6(a)可以看出,采用MUSIC 算法对入射角度于(45°,75°),(45°,80°)进行估计失败,而采用四阶累积量MUSIC算法进行估计时得到了两个尖锐的谱峰,通过四阶累积量MUSIC 算法的谱函数搜索得到入射角度为(45°,75.5°),(45°,80°)。由此可见,采用四阶累积量MUSIC算法使得阵列孔径得到了有效的扩展,其分辨力高于MUSIC算法。
2.2.2 四阶累积量2D-MUSIC算法与MUSIC算法计算量分析
MUSIC算法通过对接收数据的协方差矩阵和进行特征分解,运算量为ο(M2 K) + ο(M3)。计算一个四阶累积量需要9L次复乘运算,其中L表示快拍数,奇异值分解的计算量约为ο(M6),其中M表示所构造的累积量数据矩阵的维数。其实从四阶累积量MUSIC 算法阵列扩展原理图可知,采用该算法进行谱峰搜索所用的阵元个数远远的多于原阵列的阵元个数。譬如在图6(b)的仿真实验中,需要对方位角0~360°,仰角0~90°范围内进行谱峰搜索,那么将方位角和仰角的搜索步长分别设置为1°,0.5°,则需要361 × 181次谱函数计算,而谱函数计算量与阵列导向矢量有关,即与阵元数量有关。也就是说虽然四阶累积量MUSIC算法引入虚拟阵元扩大孔径使得分辨力提高,但也导致谱峰搜索的计算量大增。
仿真分析5:
计算量仿真统计分析。对不同快拍数下这两个算法所占用的计算时间进行统计,各算法计算时间均由100次Monte-Carlo实验进行平均得到,见表1.

由表1可以看出,四阶累积量MUSIC算法的计算时间大约是MUSIC 算法的4 倍。但文献[5]中从算法的角度给出了一种快速去冗余的方法,将M2 × M2 的四阶累积量矩阵转化为(2M – 1) × (2M – 1)的四阶累积量矩阵,从而大大降低了计算量。同时相信随着DSP 和FPGA 等数据处理飞速发展,四阶累积量MUSIC算法的运算时间会减小,从而更好的将四阶累积量MUSIC算法应用于阵列信号处理中。
3 结语
根据机载干涉仪测向系统面临着可供布阵的空间有限,不能像陆基一样布阵成理想阵列,考虑到飞机机身横向较窄而纵向很长给出了椭圆阵列模型,通过仿真分析了椭圆孔径与波长之比对入射角度的估计性能,发现了测向精度受阵列有效孔径的限制。然而在实际机载测向系统中通过增大阵列孔径来提高分辨力估计性能是不现实。考虑通过四阶累积量阵列扩展特性来引入虚拟阵元,这样就可以在受限平台上实现天线盘孔径大增,完成一。二维DOA高精度估计。惟一的缺点就是计算量大,所以今后的努力方向是不仅要从改进算法的角度来减少四阶累积量的运算量,也从用DSP来实现的角度缩短执行时间。