摘要:设计了针对中卫香山地区硒砂瓜温室种植的智能控制系统,设计依托温度传感器wzppt100、湿度传感器HS1101以及单片机MC68HC705 C8等硬件,在采集与处理温室温度、湿度、光照度等参数的基础上,采用模糊算法,实现对温室卷帘机、换气扇、供暖器、微管喷滴灌等系统的实时控制。
关键词:温室;模糊控制;MC68HC705C8;传感器
硒砂瓜被称为“石头缝里长出的两瓜”,是宁夏中卫香山地区农民在沙砾淤积丰富的香山冲击扇区域将大量碎沙石覆盖在山地表层,利用砂砾铺压对地表所具有的节水、增温、保墒效果的一种特殊种植模式下产出的西瓜。这里海拔1 600~1 800 m高的得天独厚光热资源为两甜瓜中天然葡萄糖、维生素、氨基酸和多种微量元素特别是食物中稀缺的硒元素的积聚提供了独特的自然条件,因此产出的西瓜个大皮厚、保鲜期长、便于运输、果汁丰富、甘蜜爽口,糖份含量高达13.8%。
硒砂瓜的营养元素含量全面合理,其中,含人体所需的氨基酸18种,维生素3种,微量元素5种,含钙56 mg/kg,钾1 090 mg/kg,特别是含有人体保健必需的硒和锌等微量元素。
温室种植硒砂瓜可以大幅提高其年产量。如今,硒砂瓜种植产业科学化、标准化发展已经成为当地农民增收、农业增效的发展趋势,而温室模糊控制系统的设计与实施,是实现科学化、规模化种植的必要措施。
1 控制系统概述
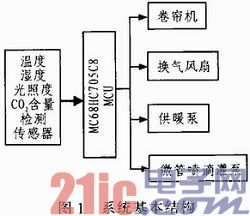
本系统由传感器子系统、基于模糊算法的单片机处理子系统、卷帘保暖子系统、供暖与换气子系统、微管喷滴灌子系统组成,基本结构如图1所示。
2 模糊算法
众所周知,温室环境系统是一个复杂的大系统,具有时变性、非线性且不确性等特点。如增加室内的湿度,就会引起温度的降低,同样,温度的升高也会引起室内湿度发生变化,这就为基于传统控制理论开发温室控制系统带来了很大的困难。模糊控制是以模糊数学为基础发展起来的一种非线性的控制方法,模糊控制在一定程度上模仿了人在操作控制过程中的思维和逻辑推理,不需要建立控制对象精确的数学模型,只需将现场操作人员的经验和数据总结成较完善的语言控制规则并形成模糊控制芯片的工作软件即可。因此它能解决对象的不确定性、非线形、时变性、滞后等问题,系统的鲁棒性强。
2.1 模糊控制器设计
系统设计中,如图2所示,温度的实际测量值用Tt表示,湿度的实际测量值用Ht表示,温度和湿度设定值分别用T0、H0表示,将温湿度误差ET、EH作为控制器输入,则ET=Tt-T0,EH=Ht-H0,控制器的输出变量分别用U1,U2,U3,U4表示,其中,U1-卷帘机控制;U2-供暖泵控制;U3-换气风扇控制;U4-微管喷滴灌控制。
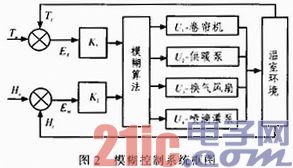
其中,T0,H0来自上位机,Tt、Ht来自现场传感器,K1、K2为量化因子,实际应用中,根据现场实况及以往人工控制经验,可调整其值。
2.2 隶属函数
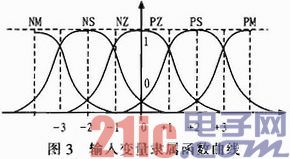
在实际应用中,隶属函数主要有正态函数、梯形和三角形等几种形式,由于人们对事物的判别往往沿用正态分布的思维方式,因此,如图3所示,本设计采用正态分布函数来表示模糊变量的隶属函数。
2.3 建立模糊控制规则
模糊控制器的控制规则是基于手动控制策略,是操作者经验和技术知识的集合,通过语言归纳出来的条件语句,利用模糊集合理论和语言变量的概念,把利用语言归纳的手动控制策略上升为数值运算,最后写成矩阵形式就构成了基本模糊查询表(决策库),并由此实现模糊自动控制。表1所示为Ut的模糊查询表,同理可得出U2、U3、U4的模糊查询表。

3 电路设计
如图4所示,系统控制的核心选用MOTOROLA公司CMOS工艺8位单片机MC68HC705C8,其主要特点是片内EPROM/OTPROM最多可达7744字节,24条双向I/O线,7条固定输入线,电源电压3.0~5.5 V(2 V数据保持方式),WAIT、STOP低功耗和数据保持方式,可选择存储器设置等。
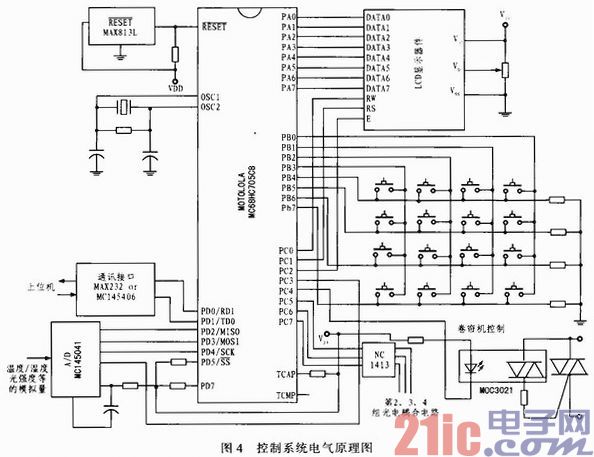
在控制电路中,单片机的A口PA7-PA0与LCD显示器件的DATA7-DATA0相连,将传感器数据传送到LCD器件,而PC2-PC0与LCD器件的E、RS、R/W端相连,以控制数据的传送。PA7-PA0设置为输出口,于是A口的数据方向寄存器($04)应初始化为$FF。单片机B口的高四位PB7-PB4依次接4x4键盘矩阵的4个行,作为输入口,而低四位PB3-PB0依次接4x4键盘矩阵的4个列,作为输出口,因此B口的数据方向寄存器($05)应初始化为$0F。A/D转换器选用MC145041,它是8位11路逐次比较型A/D转换器,片内设置了多路模拟选通开关以及通道地址译码及锁存电路,将转换后的数据送入三态输出数据锁存器。它的DOUT、DIN、SCK与SPI引脚相连接,而PC3与A/D转换器的片选端相连接,由此实现了单片机与A/D转换器之间以SPI方式进行数据传输。传感器与A/D转换器的模拟输入通道相连。C口的PC7-PC4分别通过放大器后,再驱动光电耦合器控制品闸管从而操纵卷帘机、风痢电机、供暖泵和微管喷滴灌泵。因此C口的所有端作为控制端,均为输出,这样C口的数据方向寄存器($02)应初始化为$FF。RDI、TDO设置为串行通讯口。端外接看门狗电路MAX813L。其它不用的端PD5、PD7应通过上拉电阻与VDD相接。温度检测选用廉价的WZP Pt100型热电阻作温度传感器,该器件耐磨、耐碰,体积小,使用方便,适合于恶劣环境的现场温度测量。选用电容式湿度传感器HS11,它是基于独特工艺设计的电容元件,动态范围大,动态响应快,几乎没有零漂。光照采集电路主要由一个TSL235型光频转换器和多路开关构成。在CO2浓度测量上采用响应速度快、测量精度高、技术成熟的红外CO2气体传感器6004。针对冬季、夏季大环境温度、湿度的大幅变化,控制系统的软件参数可通过上位机加以改变。
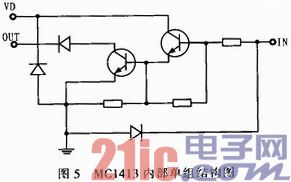
设计中,在输出通道采用光耦MOC3021进行隔离,将单片机系统输出的信号隔离后送入后控电路,避免了晶闸管对单片机的干扰。“看门狗”电路应用MAX813L芯片实现,该电路具有以下4种功能:1)加电、掉电以及降压使用情况下的复位输出,复位输出为高电平;2)独立的“看门狗”输出,“看门狗”最大定时时间为1.6 s:3)1.25 V门限检测器,用于电源故障报警,低电压检测或+5 V以外的电源的监控;4)低电平有效的人工复位输入。单片机发出的控制信号由MC1413来驱动放大,输出直接驱动光电耦合器。MC1413输入低电平时断路,输入高电平时为达林顿输出,电流较大,而电平为低,相当于反向隔离驱动放大器。MC1413的内部单组结构如图5所示。
4 软件设计
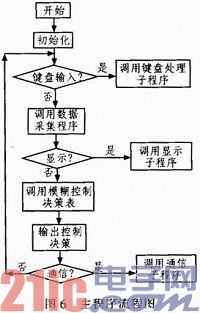
系统软件主要包括:主程序,键盘中断子程序、数据采集子程序和与上位机通信的子程序等,主程序流程图如图6所示,系统在完成初始化后,通过调用相关的子程序来实现数据采集、显示、模糊控制及通信等功能。
下位机软件利用汇编语言编制,主要侧重于信号采集、数据显示和通信。上位机软件可视化语言VB6.0编制,重点放在模糊控制决策表的计算以及检测上。
5 结束语
本系统以MC68HC705C8单片机为核心,实现对温室的温度、湿度、CO2浓度和光照度的测控,系统运行可靠、操作简单、精度高且响应速度快,同时,由于数据采用模糊处理方式,因此控制结果可与人工操作相媲美,提高了温室生产的智能控制管理水平,对规模化温室种植具有广泛的开发应用前景。
![[四轴飞行器教程]适合新手的简单PID调节方法,任何飞控通用](/Uploads/2014_12/video/vi8fc8d028840bfa6c191d73d8eafcc08b_s.jpg)


























