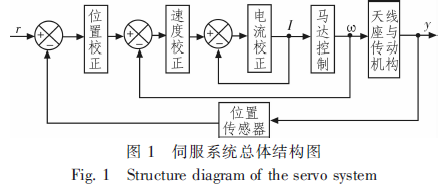
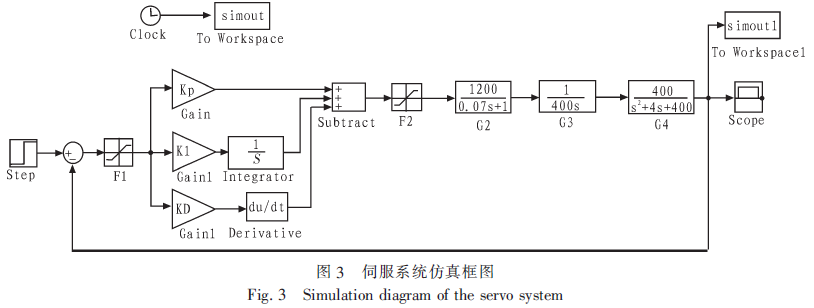
针对 PID参数复杂繁琐的整定过程这一问题,提出了基于MATLAB/Simulink仿真环境,模拟工程稳定边界法的船载雷达伺服系统PID参数整定策略和步骤,并进行了仿真实验。结果表明该方法具有良好的收敛性,使得控制系统动态性能得到有效改善,并且很大程度上减少了工作量。
基于stm32f401单片机的四轴飞行器系统的设计
变频器功能应用从入门到精通—第6章变频器PID控制第1节
基于MATLAB-Simulink的系统仿真技术与应用—习题讲解
基于MATLAB-Simulink的系统仿真技术与应用—1.3.2
仿真基于VCS和Modelsim
使用Quartus II进行仿真验证
基于MATLAB-Simulink的系统仿真技术与应用—1.1_1.3.1
labview 8.6 入门视频教程 做一个示波器 1
x