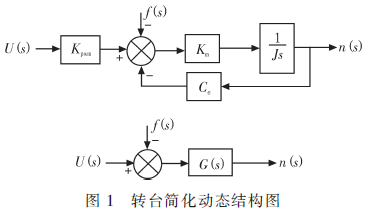
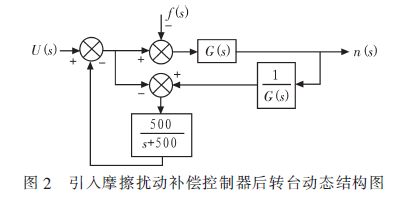
针对陀螺测试速率转台低速时存在的问题,为提高系统低速的跟踪精度,提出了一种基于摩擦补偿控制和重复控制构成的复合控制新模式,详细分析了复合控制原理,和复合控制应用于陀螺测试速率转台控制系统的结构,设计了摩擦补偿控制器、重复控制器和速度控制器,并进行了软件设计。仿真表明复合控制对转台低速运行时的摩擦干扰抑制效果显著,进一步提高了系统低速的跟踪精度。系统具有良好的动态性能和静态性能,实用性强。
《吃豆人》——基于FPGA和51单片机的小游戏设计
光立方(3D8) 8x8x8 LED 通讯协议说明
太震撼了,告诉你一群微型四轴飞行器怎么玩
TCA8424:第一款HID over I2C键盘控制器
使用51单片机最小系统控制 3D8 光立方
六轴飞行器飞行初次测试
光立方(3D8) 实时取模程序音谱效果大放送
全手工最小的wifi机器人 桌面wifi机器人
Cocktail
x