本文采用第九届“飞思卡尔”杯全国大学生智能车竞赛的汽车模型作为研究平台,以32 位单片机MK60DN512VLQ10 作为主控制单元,运用IAR 软件作为开发工具进行智能控制策略研究。
道路信息检测模块普遍采用简单、速度快的数字类摄像头。本届车模后置双电机,因此需要对两个电机分别进行速度检测,方向PID 控制。
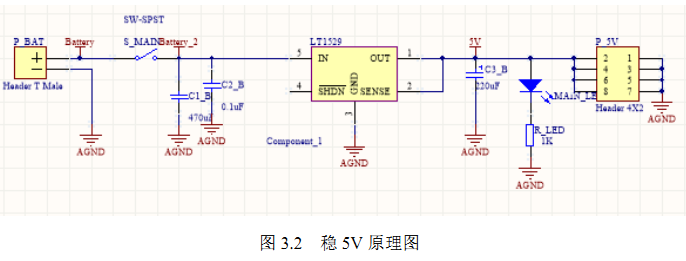
在电源模块设计中,采用Linear 公司线性稳压电源芯片LT1529-5 作为稳压5V 输出,为编码器供电;采用TI 公司LM1117 作为稳压3.3V 输出,为单片机、摄像头、串口通信模块供电。
单片机软件算法部分为本文论述的重点,主要体现了智能车的智能控制策,运用PID 控制理论完成对车模平衡、速度、方向的控制;继续沿用以往的循迹算法,对新型赛道的识别及处理为我队创新之处。
本篇技术报告将从智能车机械结构、硬件电路、图像处理、控制算法等方面详细介绍整个准备过程。