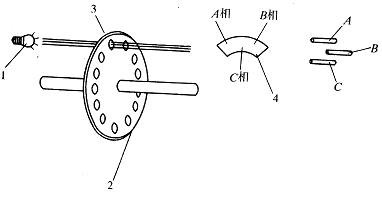
舵机由舵盘、位置反馈电位计、减速齿轮组、直流动电机和控制电路组成,内部位置反馈减速齿轮组由直流电动机驱动,其输出轴带动一个具有线性比例特性的位置反馈电位器作为位置检测。当电位器转角线性地转换为电压并反馈给控制电路时,控制电路将反馈信号与输入的控制脉冲信号相比较,产生纠正脉冲,控制并驱动直流电机正向或反向转动,使减速齿轮组输出的位置与期望值相符。
第十二节:K60的定时器PIT、LPTMR、SysTick讲解
第十七节:K60的USB虚拟串口讲解
第十三节:用K60的DMA进行摄像头采集
第九届飞思卡尔智能车华南赛区-东道主武汉理工大学的光电小车
第一节:飞思卡尔智能车K60入门介绍
第七届全国大学生“飞思卡尔”杯智能车竞赛浙江赛区摄像头组
007.飞思卡尔智能车——OLED
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
Cocktail
x