在本届比赛上,使用竞赛秘书处统一指定的竞赛车模D 车模套件或E 车模套件,采用飞思卡尔半导体公司的32 位微控制器MK60DN512VLQ10 作为核心控制单元,自主构思控制方案,进行软件以及硬件的设计,包括摄像头传感器信号采集处理、电机驱动、系统板的开发等。制作的两轮平衡车能够在特别设计的赛道上自主识别路径,通过车模上两个后轮驱动自动行驶,并且实现自动停车。本技术报告将对摄像头平衡组的车子整体设计思路,硬件与软件的设计以及实现,机械结构的调试安装以及车子参数调试的过程进行简要说明。
变频器功能应用从入门到精通—第6章:变频器PID控制第2节
初学者学智能车视频教程012 CCD模块知识
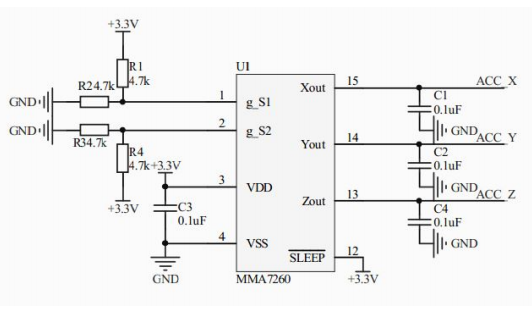
「ADI模拟大学堂」基础加速度计传感器
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
1.HJ-4WD智能小车零基础操作篇1-新手必看(全屏高清)
线性CCD从原理到使用最详细讲解一、线性CCD的原理
11.C51智能小车零基础入门篇1—51单片机最小系统(全屏高清)
第十二节:K60的定时器PIT、LPTMR、SysTick讲解
x