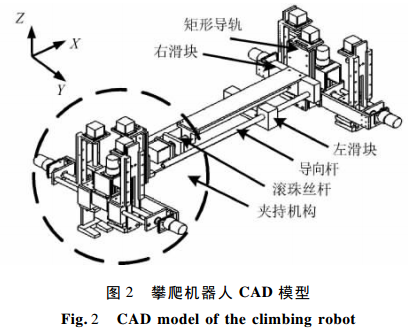
根据对电力铁塔攀爬机器人夹持机构的运动和受力分析,提出并设计了一种新型双V字夹持机构,其夹持爪V形槽角度固定,大小可变,双爪联动可从多个方向对不同规格角钢夹持 建立了机构CAD模型及数学模型,并对夹持力进行了动力学仿真 进行实验室样机试验,其结果验证了这种夹持机构能够从多个方向对宽度为80~220mm不同规格的角钢进行可靠夹持,为攀爬机器人在电力铁塔移动提供可靠的夹持力。
[四轴飞行器教程]适合新手的简单PID调节方法,任何飞控通用
哈工大 工业控制网络(现场总线) 视频教程
xy 坐标 雕刻机 光驱制作(51单片机)
变频器功能应用从入门到精通—第1章:变频器功能概述第1节
西安交通大学电机学66(阎治安主讲)
西安交通大学电机学71(阎治安主讲)
51/AVR单片机 GSM手机短信控制窗户/开关窗系统(智能家居系统)
单片机公交报站器/全自动报站器/ISD404/ISD1760/语音录放
x
![[四轴飞行器教程]适合新手的简单PID调节方法,任何飞控通用](/Uploads/2014_12/video/vi8fc8d028840bfa6c191d73d8eafcc08b_s.jpg)


























