本论文主要研究内容包括微小型轮腿式机器人的总体方案设计、机械机构和远程遥控系统的设计的实现及其功能的验证。依据系统总体方案,重点对总体机械结构、运动学动力学分析、虚拟仿真和设计过程,采用nRF9E5控制芯片远程控制系统等内容进行了研究。
Arduino-2WD轻量移动机器人旋转机动性测试
Arduino-2WD轻量型移动机器人超声波旋转侦测演示
Arduino-4WD移动机器人寻线与避障功能演示
Arduino-2WD轻量型移动机器人避障功能演示
Arduino-2WD轻量型移动机器人追光功能演示
3-4 设计双层PCB之一:规划电路板
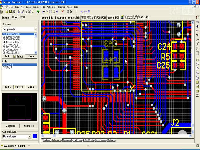
3-6 设计双层PCB之三:布线操作
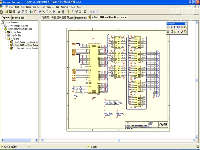
2-7 自底向上设计层次原理图
x