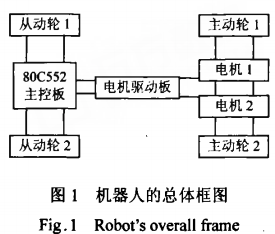
智能导航系统能完成机器人自主路径规划、行为控制及执行多种任务.结合人类的经验及模糊控制理论对四轮移动机器人进行了智能导航的研究.机器人采用超声波探测的方法,用12个超声波传感器感知机器人前方1800范围内障碍物的距离和方向信息.利用模糊控制决策理论实现对机器人智能导航的控制,通过在机器人上的应用验证了该导航系统的可行性和有效性.
Arduino-2WD轻量移动机器人旋转机动性测试
Arduino-2WD轻量型移动机器人超声波旋转侦测演示
Arduino-4WD移动机器人寻线与避障功能演示
Arduino-2WD轻量型移动机器人避障功能演示
Arduino-2WD轻量型移动机器人追光功能演示
3-4 设计双层PCB之一:规划电路板
3-6 设计双层PCB之三:布线操作
2-7 自底向上设计层次原理图
x