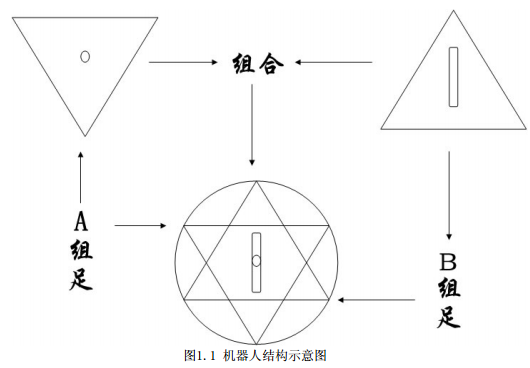
本文六足机器人是一种基于仿生学原理研制开发的新型足式机器人。 新型机器人比传统的轮式机器人有更好的移动性,它采用类拟生物的爬行机构进行运动,自动化程度高, 具有丰富的动力学特性。 此外, 足式机器人相比其它机器人具有更多的优点:它可以较易地跨过比较大的障碍(如沟、坎等) ,并且机器人足所具有的大量的自由度可以使机器人的运动更加灵活, 对凹凸不平的地形的适应能力更强; 足式机器人的立足点是离散的, 跟地面的接触面积较小, 因而可以在可达到的地面上选择最优支撑点,即使在表面极度不规则的情况下,通过严格选择足的支撑点,也能够行走自如。