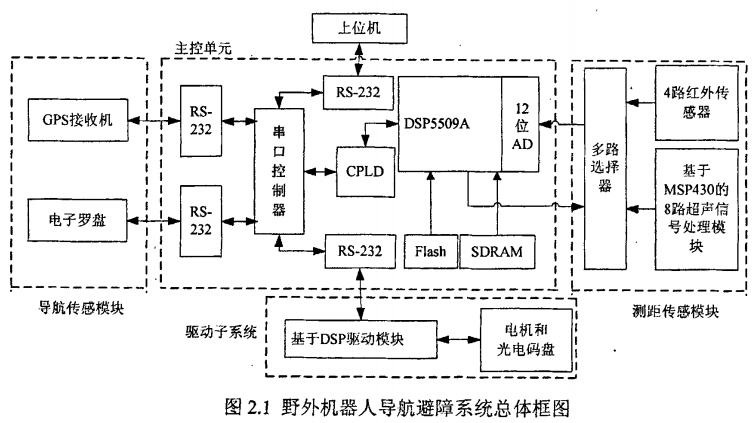
移动机器人是机器人学中的一个重要分支,具有广阔的发展前景,尤其是野外环境下的移动机器人,广泛地应用到侦查、探测、军事、搜救等特殊场合。这些应用对移动机器人导航避障能力提出了更高的要求。本文以DSP5509嵌入式开发板为控制平台,设计了野外环境下的移动机器人的导航避障系统。
单片机毕设调试指导视频9、继电器调试与外接负载方法
基于FPGA的交通灯设计(非单片机)-红外遥控通行状态
单片机毕设调试指导视频7、从protel中粘贴清晰图
单片机毕设调试指导视频8、芯片引脚说明
单片机毕设调试指导视频10、仿真软件怎么用(入门)
单片机毕设调试指导视频6、按键轻触按键的调试方法
单片机毕设调试指导视频4、数码管电路调试方法
单片机毕设调试指导视频2、LCD1602液晶的调试方法
x