针对传统油罐检定方法中,径向偏差测童精度低、操作危险、效率低等问题,研制一种小型的立式金属罐爬壁检定机器人。该机器人采用永磁吸附三轮式结构,测控系统以单片机89邪1为核心,并配备多种传感器,实施有缆遥控操作。现场实验表明,该机器人自动化程度高,径向偏差测量准确,大幅度提高了油罐检定效率和检定精度。
初级反汇编视频教程08-算法反汇编(啊冲主讲)
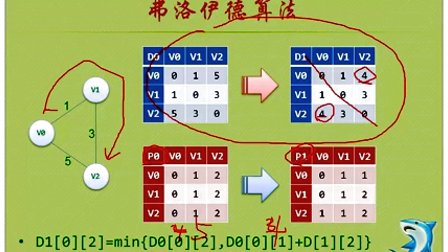
65最短路径(弗洛伊德算法)
68关键路径(代码讲解)
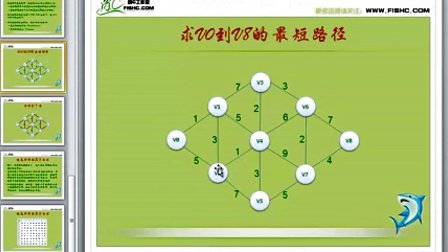
最短路径(迪杰斯特拉算法)
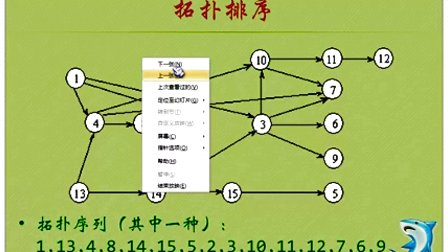
66拓扑排序
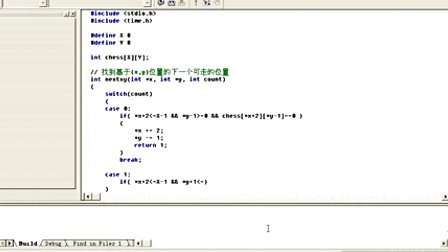
60马踏棋盘算法(骑士周游问题)
44二叉树2
清华IT学习C语言第一讲程序设计与算法(宏图赖国荣)
x