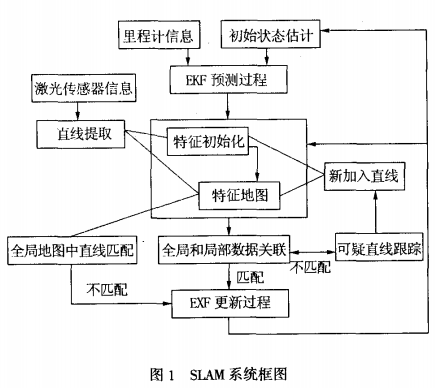
介 绍 了 一种 移 动机 器人 室 内环 境 下 同 时定 位 与 地 图构 建 方 法 , 给 出 了整 个 系统 的 结构框图。 将从激光传感信息 中提取 出的 直线特征作为主要 的环境描述特征 , 用 EKF 算法更新机 器人位 姿和 直 线特 征 的估 计值 , 用一种 新 的数 据 关联 方 法 以 实现 地 图的 最 小描 述 。 直 线特 征 提 采改进的 IEPF 算法 , 能够快速地从数据点 中得到较为精确 的 直线参数 。 实验证 明整个 系统具有良好 的性 能。
高科技机器人,变形金刚,神兽金刚曝光!
山东大学的大狗机器人通过863一期,可载人 可抗侧踢
基于无线网络的机器人安防项目--华清远见
国产技术宅屌丝DIY恐怖机器人
单足自平衡机器人
基于单片机与传感器的机器人头部运动设计与实现
超强的魔方机器人【点击率最高的视频】
基于51单片机的智能清洁机器人
x