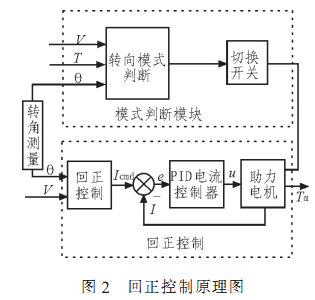
以改善商用车电动助力转向系统的回正特性为目标,开发了一种基于转向盘转角的回正目标电流控制器,该控制器以转角传感器LH3获取的转角信号为输入,经PID控制方式获取回正目标电流,通过控制助力电机动作,使转向盘准确快速回位。并利用Simulink仿真软件搭建了该回正控制器仿真模型,对回正特性进行分析。仿真结果表明:转向盘的回正稳定时间大大缩短,该回正控制器明显提高了EPS系统的回正性能。
基于MATLAB-Simulink的系统仿真技术与应用—习题讲解
基于MATLAB-Simulink的系统仿真技术与应用—1.3.2
仿真基于VCS和Modelsim
使用Quartus II进行仿真验证
基于MATLAB-Simulink的系统仿真技术与应用—1.1_1.3.1
labview 8.6 入门视频教程 做一个示波器 1
基于MATLAB-Simulink的系统仿真技术与应用—1.3.3
基于MATLAB-Simulink的系统仿真技术与应用—3.1.1_3.2.1
Cocktail
x