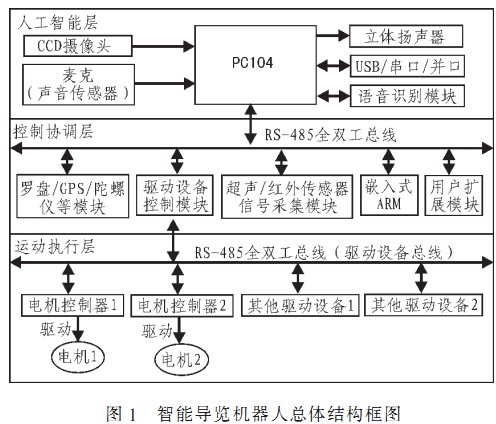
在研究机器视觉的移动机器人导航技术的基础上,基于层次结构,简单介绍导览机器人控制系统的总体方案及软硬件设计。采用图像处理中的边缘检测和模板匹配方式进行机器人的视觉导航,使机器人在结构化道路环境下能够自动躲避障碍物,停靠到目标点,并能向参访者导览解说,最后验证了该系统的有效性和优越性。
单片机音乐喷泉设计/音乐频谱彩灯设计/DIY电子制作
高清毕设课设 单片机步进电机控制系统 LED
吉大自动控制原理04 控制系统的时域分析法
基于CAN总线的温度采集显示及控制系统
单片机自动门控制系统设计
高清毕设课设 单片机简易交通灯控制系统
吉大自动控制原理07 控制系统的时域分析法
无线温湿度设计系统,温湿度大棚控制系统
x