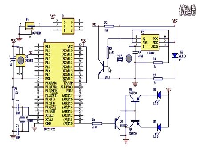
本小组所设计一个带有红外传感器的小车,基本能实现自动避障的功能。本小车以STC89C52为其主控单元,以俩个直流减速电机为驱动电机提供基本动力,并依据差速原理实现转向,用红外传感器进行探测,使用分离元件组成的电路去驱动电机,使用PWM波实现变速功能。小车分为五个模块:STC89C52主控模块,传感模块,电源模块,电机驱动模块,测速模块。其总体框图如下:
基于51单片机的触摸调光LED台灯设计-原理图讲解
基于51单片机指纹密码锁毕业设计
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
1.HJ-4WD智能小车零基础操作篇1-新手必看(全屏高清)
线性CCD从原理到使用最详细讲解一、线性CCD的原理
11.C51智能小车零基础入门篇1—51单片机最小系统(全屏高清)
第十二节:K60的定时器PIT、LPTMR、SysTick讲解
25.C51智能小车提高篇2—STC12C5A60S2内置看门狗实验(全屏高清)
x