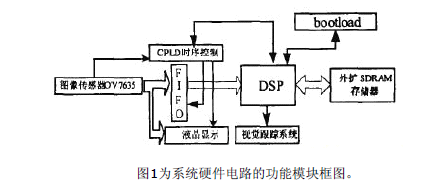
本系统在设计上采用CMOS 图像传感器代替CCD 类型传感器进行采集图像,DSP 处理芯片TMS320VC5509A 进行图像处理以及作为CPU 控制,在设计过程中,为了直观显现机器人视觉系统识别和跟踪的效果,专门采用了一个TFT 格式的液晶来直观显示。软件上,采用了一部分足球机器人的视觉技术来达到对目标的快速识别,通过全局的特征矩构建的雅可比矩阵达到对目标的自适应跟踪。
cpld 10
cpld 9
cpld 3
cpld 8
cpld 7
cpld 6
cpld 5
cpld 4
x