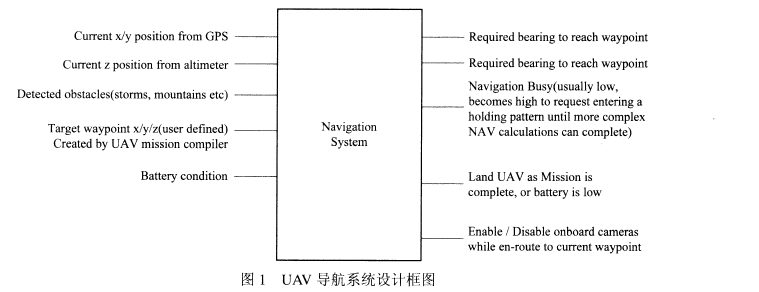
本课题实现了用于无人驾驶空间飞行器(UAV) 的人工智能导航系统。该系统采用现有的输入数据和白定义的任务书,收集数据并产生用于其它系统控制飞行器的导航参考信号。图l 所示为UAV 导航系统设计框图,由Altera Cyclone FPGA 实现。根据输入的动态变化,该导航系统的输出不断进行更新,而输入是随着UAV 或障碍物位置的变化而变化的。导航系统产生的输出信号可用于其它UAV 系统,例如飞行器将着陆时需要的信号指/j,系统,该系统在UAV 任务完成或要求飞行器紧急降落时使用。
第十讲 FPGA设计常用IP核-锁相环
第10讲:FPGA设计常用IP核-锁相环
《吃豆人》——基于FPGA和51单片机的小游戏设计
Lesson31:时序分析基础—专辑:《quartus 教学视频》
FPGA/集成电路 笔试面试题09090001
FPGA/集成电路 笔试面试题09090003_0
Lesson32:如何使用TimeQuest—专辑:《quartus 教学视频》
第1讲:FPGA系统设计基础--华清远见fpga培训视频教程
x