摆臂伺服控制系统是大气红外干涉仪的重要组成部分,在分析干涉仪工作原理和伺服控制需求的基础上,给出了一种采用FPGA实现伺服控制、结合典型H型直流PWM电路,构成数字化摆臂伺服控制系统的设计方法,仿真与实验结果验证了设计的正确性。
第十讲 FPGA设计常用IP核-锁相环
第10讲:FPGA设计常用IP核-锁相环
《吃豆人》——基于FPGA和51单片机的小游戏设计
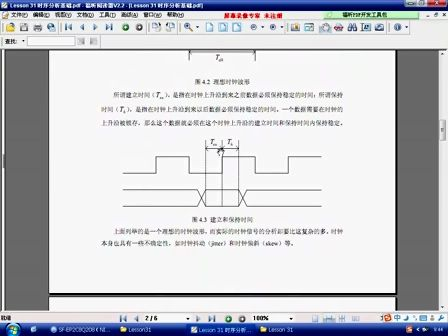
Lesson31:时序分析基础—专辑:《quartus 教学视频》
FPGA/集成电路 笔试面试题09090001
FPGA/集成电路 笔试面试题09090003_0
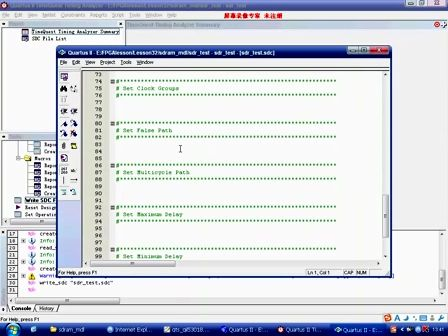
Lesson32:如何使用TimeQuest—专辑:《quartus 教学视频》
第1讲:FPGA系统设计基础--华清远见fpga培训视频教程
x