本技术报告以“飞思卡尔”杯智能汽车竞赛为背景,详细介绍了制作具备自主识别路径,并快速、稳定行驶在跑道上的智能车的设计方案及其实现技术。本技术报告首先介绍了系统的总体设计思路,并详细阐述了系统硬件、软件以及路径识别与控制相关算法的设计与实现,同时对车模的机械调整系统调试进行了说明,最后系统地总结了智能车设计、制作和调试过程中遇到的各种问题。
基于stm32f401单片机的四轴飞行器系统的设计
变频器功能应用从入门到精通—第6章变频器PID控制第1节
传感器与信号调理(山东大学)—第27讲
传感器与信号调理(山东大学)—第01讲
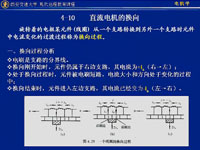
西安交通大学电机学66(阎治安主讲)
西安交通大学电机学71(阎治安主讲)
西安交通大学电机学15(阎治安主讲)
西安交通大学电机学70(阎治安主讲)
Cocktail
x