设计了一个基于MSP430F149单片机自动避让小车控制系统,系统由两个带有无线通讯模块、电机驱动模块、循迹模块以及超声波测距模块的小车组成。通过无线通讯模块、超声波模块以及利用红外遁迹模块来确保两车在规定的车道里的行驶和相互避让,并且采用了模糊算法来实时响应小车循迹模块信号,从而保证了小车快速向前行驶,而且不超出边界。
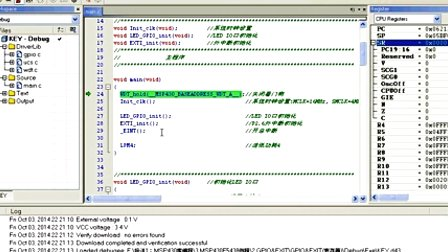
爱晶电子MSP430库函数编程3.GPIO
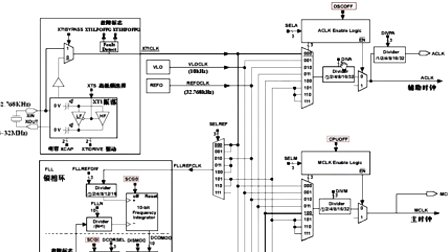
爱晶电子MSP430库函数编程2.时钟系统
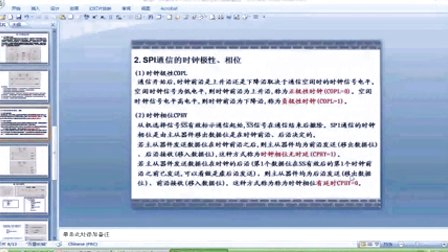
爱晶电子MSP430库函数编程5.2SPI通信
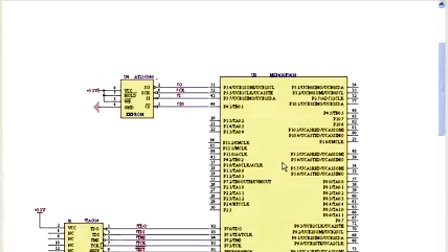
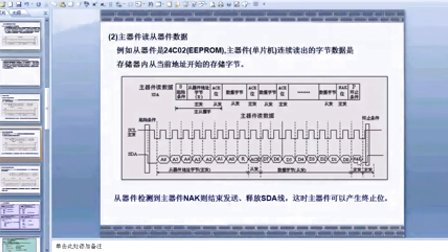
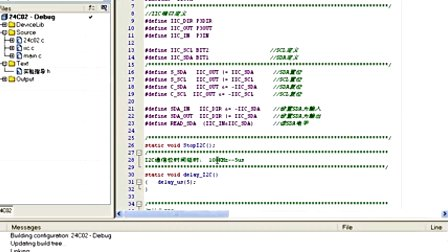
爱晶电子MSP430库函数编程6.1I2C通信与EEPROM_24C02读写
爱晶电子MSP430库函数编程6.2I2C通信
爱晶电子MSP430库函数编程5.1SPI通信与EEPROM_25C040读写
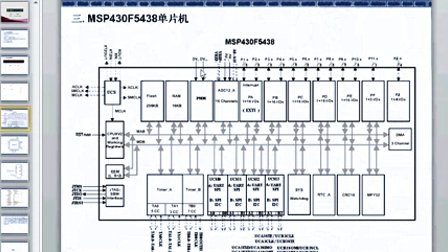
爱晶电子MSP430库函数编程1.单片机MSP430F5438
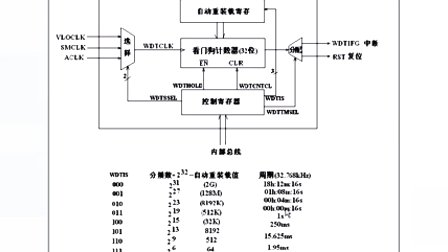
爱晶电子MSP430库函数编程9.看门狗WDT_A
x