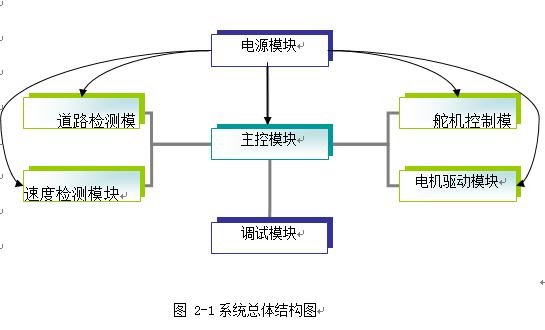
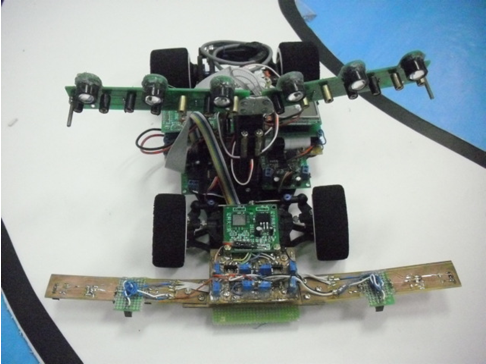
系统采用飞思卡尔16位单片机MC9S12G128为核心控制单元,由车身上方的光电传感器和固定在车身前方的红外传感器分别进行路径信号的采集和起跑线特征的识别;车身后部的编码器进行速度的采集,并将采集到的模拟电压、TTL电平以及脉冲送至MCU,经MCU处理后,分别控制转向舵机、直流电机,完成智能车的调速、转向及制动等控制,使小车始终沿着赛道快速而又稳定地行驶并有效驻车。
cpld 3
EasyEDA1.2电路原理图、spice及PCB设计主界面介绍
《吃豆人》——基于FPGA和51单片机的小游戏设计
光立方(3D8) 8x8x8 LED 通讯协议说明
太震撼了,告诉你一群微型四轴飞行器怎么玩
TCA8424:第一款HID over I2C键盘控制器
使用51单片机最小系统控制 3D8 光立方
六轴飞行器飞行初次测试
Cocktail
x