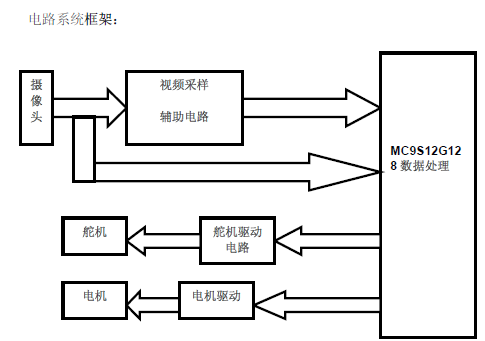
本智能小车以飞思卡尔16位微控制MC9S12G128作为唯一的核心控制单元,采摄像头作为传感器,感应由赛道两边黑色引导线检测道路信息,通过单片机处理优化,把控制信号发送给电机和舵机。同时通过自制的转速传感器获取小车速度,进行速度反馈处理,最后利用PID 控制方式作为电机驱动。本文对摄像头的彩像及对跑道位置的的检测进行了简要的分析,对小车的硬件与软件设计进行了介绍。
技术报告以智能小车的设计为主线,包括小车的构架设计、软硬件设计,以及控制算法研究等,共分为七章。其中,第一章为引言部分。第二章主要介绍了小车的总体方案的选取。第三章介绍了硬件设计,主要介绍了电路的设计;检测模块的设计。第四章对小车的视频采集和图像处理进行了详细的介绍。第五章描述了小车的软件调试过程。第六章主要介绍小车详细参数。第七章总结智能车经验和不足。