本文详细介绍了为第七届“飞思卡尔”杯全国大学生智能汽车竞赛而准备
的智能车系统方案。该系统以Freescale 32 位K60 系列微控制器
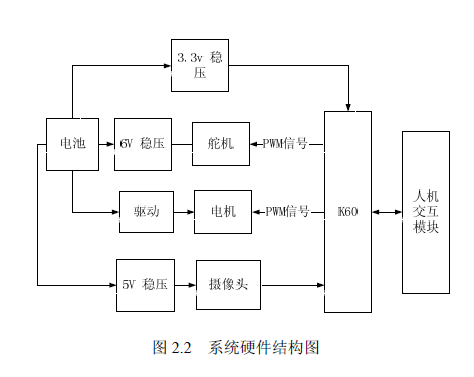
MK60N512VMD100 作为系统控制处理器,采用基于摄像头的图像采样模块获取赛道图像信息,通过最优路径选择算法提取赛道黑线,识别当前所处赛道,算出小车与赛道中心的位置偏差,采用 PID 方式对舵机转向进行控制。通过光电编码器实时获取小车速度,形成速度闭环控制。调试过程中应用蓝牙模块与上位机结合进行辅助调试。小车还将通过特定算法分析出前方的路况,并根据路况的不同而为小车分配以不同的速度。
文中主要分为四个部分:
第一章引言;
第二章硬件设计;主要介绍机械结构和调整方法,赛车转向模块和驱动模
块的设计、参数和有关测试,图像采样模块的摄像头工作机制以及安装选型、采样电路设计和采样策略。
第三章软件设计;主要分析系统的舵机转向策略、速度闭环控制与速度分
配策略。
第四章调试与性能分析;详细叙述该系统开发过程中所用到的开发工具、
软件以及各种调试、测试手段方法。