本智能车的硬件平台采用飞思卡尔的K60系列单片机作为控制核心,软件编译平台为Code Warrior IDE开发环境,车模采用大赛组委会统一提供的A车模。文中介绍了智能小车控制系统的软硬件结构和设计流程。
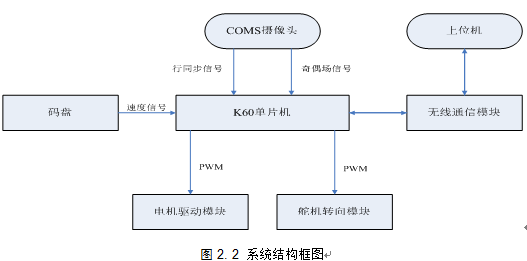
智能车系统以K60微控制器为主控制器,通过数字摄像头OV7620检测赛道信息,从而控制模型车的速度和方向,智能车速度采集使用了自制的光电编码器,坡道检测使用角速度传感器积分实现。速度控制上使用PID控制算法调节驱动电机的转速和舵机的角度,完成对模型车运动速度和运动方向的控制。在智能车的调试阶段,采用专业智能车上位机调试软件和无线模块、SD卡模块、键盘和液晶模块等辅助调试手段,进行了大量图像分析和赛道信息处理。实验结果表明,该系统设计方案可行,达到了一定的预期设计要求。