飞思卡尔全国智能车大赛——摄像头组 浙江海洋学院-超音速队
时间:08-07 13:52
查看:1026次
下载:163次
简介:
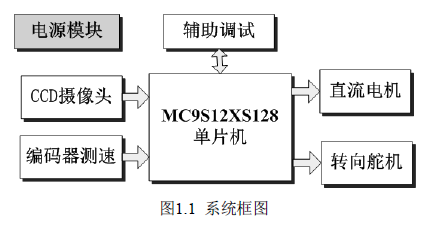
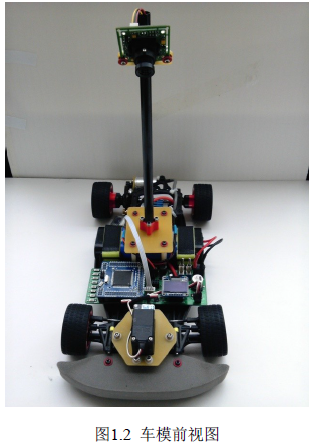
本文所设计的智能车以MC9S12XS128单片机为核心控制单元,使用CCD黑白摄像头检测赛道,通过区域搜索和灰度差值采集赛道两边的黑线,通过求平均的方式来确定中心引导线,计算与中心偏离的位置来区分不同的赛道,同时将偏离程度作为一种控制量,实现对舵机的PID方向控制,使用光电编码器检测得到的速度,结合赛道的信息,实现电机的PID速度控制。使用LABVIEW软件编写了上位机程序,使用无线蓝牙串口模块等工具来进行车模调试。通过大量的数据分析和测试,结果表明该系统设计方案可行。