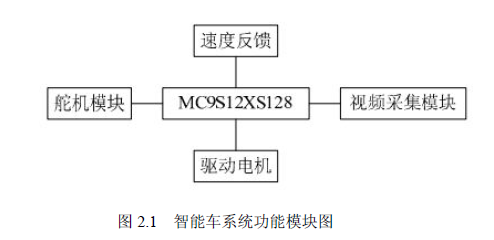
本智能车控制系统采用 Freescale 16 位微控制器作为核心控制单元,通过采集并处理摄像头信号来控制转向,同时接收车速传感器的反馈信号对车速加以控制。为了提高智能车控制性能,我们对系统进行了创造性的优化:首先,在硬件上采用单片机MC9S12XS128 作为核心控制器,并设计了数字式和模拟式摄像头兼容的路径识别方案;同时,使用两片BTS7960 来驱动电机,很好的解决了一片驱动芯片驱动电流小、温度高的问题。其次,在舵机控制策略方面,将弯道预判、模糊控制算法进行结合,增强了控制效果。再次,设计了独立的控制电路板,利用高精度测速传感器——编码器,将PID 控制和模糊控制相结合实现了速度闭环控制。最后,充分利用单片机现有
模块进行编程,同时拨码开关、状态指示灯、键盘、数码管等方便了算法调试。
智能车的控制系统需要硬件、软件以及机械等方面相互协调,所以在系统设计过程中需要不断的调整与完善。