本文主要阐述一个能沿两边有黑线的白道循迹的智能小车系统的设计过
程。
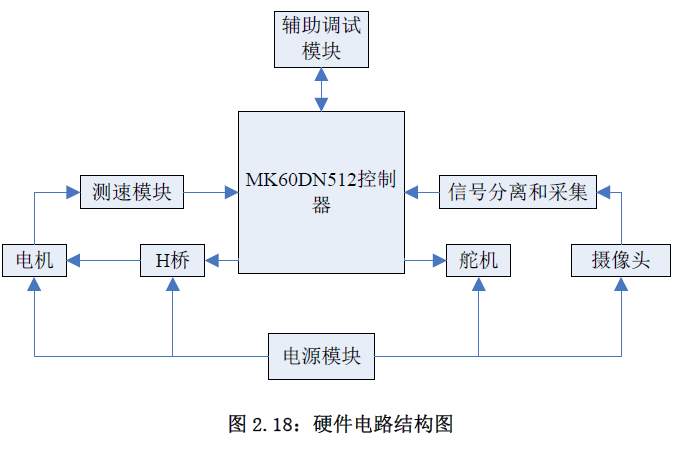
本小车以飞思卡尔公司生产的MK60DN512 为系统控制器,利用CCD 摄像头获取前方黑线信息,利用偏差计算,插值,曲线拟合,S 弯判断等方法对图像进行处理,根据图像处理得到的黑线偏差,黑线拟合斜率,黑线曲率半径等关键信息,用PID 算法对舵机进行控制,PID+Bangbang 对电机进行控制。
本文将按硬件到软件的顺序,重点从模型车机械机构的调整与改造,硬件
电路的设计与调试,图像的获取与处理算法,舵机,电机控制策略的设计方面进行介绍,在明确其中各方面的优点与不足的基础上,提出了改进的方法与设想。