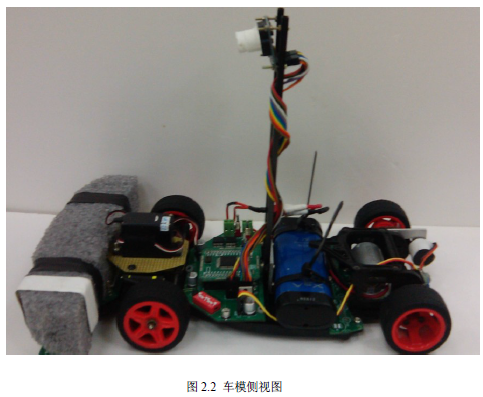
本文介绍了上海电力学院车模队伍在准备第七届“飞思卡尔”杯全国大学生智能车竞赛中设计的基于摄像头传感技术视觉引导的智能车控制系统。智能车的硬件平台采用带MC9S12XS128处理器的S12环境,软件平台为CodeWarrior IDE4.7 开发环境,车模采用大赛组委会统一提供的仿真车模。 文中介绍了智能车控制系统的设计开发流程,重点包括机械部分的调整和改造,硬件电路的设计、控制算法和策略优化、系统调试等多个方面。 我们采用了CMOS数字摄像头作为路径检测传感器获取道路信息,采用光电编码器作为测速传感器获取车模行驶速度以实现闭环控制。最终经过长时间的调试,我们制定了适合车模稳定行驶的策略,比较好的实现了车模稳定寻线行驶的任务。