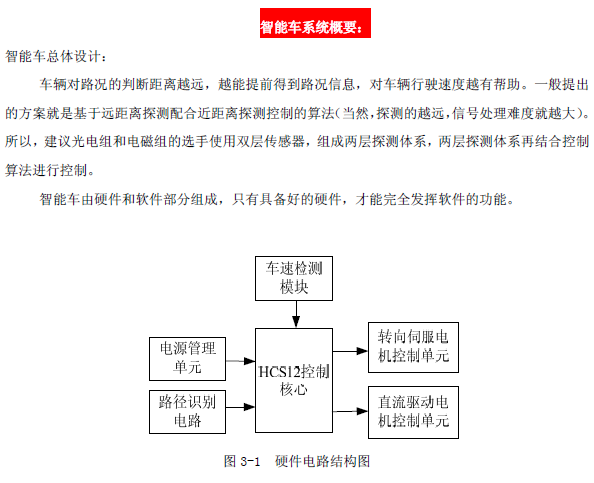
车辆对路况的判断距离越远,越能提前得到路况信息,对车辆行驶速度越有帮助。一般提出的方案就是基于远距离探测配合近距离探测控制的算法(当然,探测的越远,信号处理难度就越大)。所以,建议光电组和电磁组的选手使用双层传感器,组成两层探测体系,两层探测体系再结合控制算法进行控制。智能车由硬件和软件部分组成,只有具备好的硬件,才能完全发挥软件的功能。
天津大学暑期stm8培训-2.2-stm8集成功能
天津大学暑期stm8培训-2.3-stm8集成功能
EasyEDA1.2电路原理图、spice及PCB设计主界面介绍
输出可调直流稳压电源
《吃豆人》——基于FPGA和51单片机的小游戏设计
光立方(3D8) 8x8x8 LED 通讯协议说明
太震撼了,告诉你一群微型四轴飞行器怎么玩
TCA8424:第一款HID over I2C键盘控制器
Cocktail
x