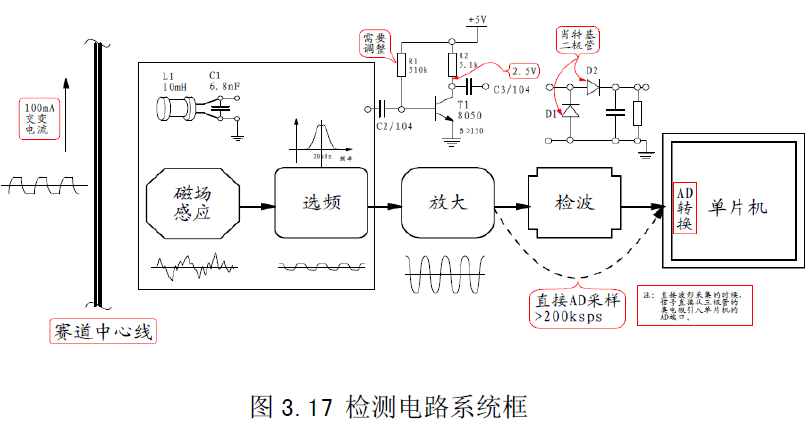
本文讨论以电磁线圈为路径探测传感器的路径识别算法和以陀螺仪和加速度传感器为小车控制小车直立的平衡算法的设计与开发,主要研究电磁线圈对通有交流电的导线的道路检测方法、初步路径识别算法。 1) 引言。主要介绍了智能车的发展意义,并针对本文电磁车的总体设计思路。 2) 控制系统总体方案设计。本章介绍了组委会对智能车设计的基本要求,系统设计思路,整体方案的设计。 3)直立行走的原理。本章介绍直立行走原理,传感器。 4)软件编写及调试。本章主要介绍小车行走的软件设计和串口调试。5)总结。
EasyEDA1.2电路原理图、spice及PCB设计主界面介绍
cpld 3
变频器功能应用从入门到精通—第6章:变频器PID控制第2节
单片机音乐喷泉设计/音乐频谱彩灯设计/DIY电子制作
工业控制网络视频(03讲)现场总线应用领域
工业控制网络视频(24讲)主站连接对象特性
工业控制网络视频(29讲)PROFIBUS协议结构
工业控制触摸屏一体机-触派品牌
Cocktail
x