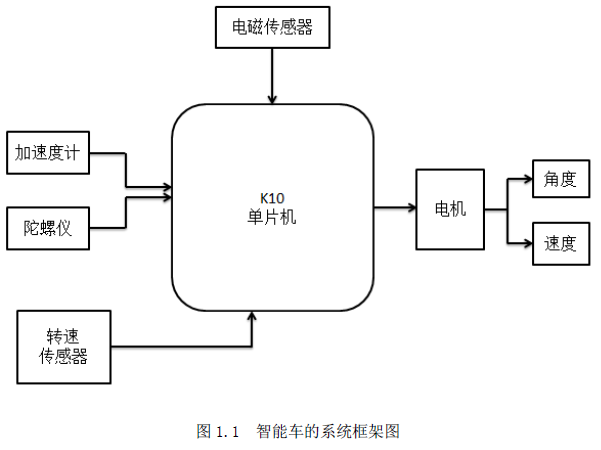
整个车子的工作过程大致如下:
对于平衡板块,加速度计与陀螺仪取得的值输入到K10,K10通过滤波算法得出车子的角度,调整电机输出使得车子直立;对于行走板块,电磁传感器取得赛道电磁特性,K10通过赛道算法得出车子当前位置,结合测速传感器读到的值,对电机进行PID控制。
EasyEDA1.2电路原理图、spice及PCB设计主界面介绍
cpld 3
变频器功能应用从入门到精通—第6章:变频器PID控制第2节
单片机音乐喷泉设计/音乐频谱彩灯设计/DIY电子制作
工业控制网络视频(03讲)现场总线应用领域
工业控制网络视频(24讲)主站连接对象特性
工业控制网络视频(29讲)PROFIBUS协议结构
工业控制触摸屏一体机-触派品牌
Cocktail
x