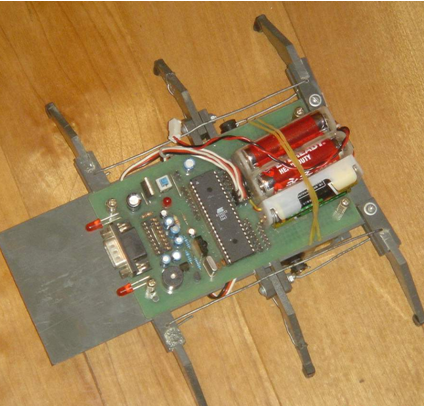
实验机器人的框架我们是使用轻型万能角钢制作的,这种角钢的两侧都有间隔均匀的孔槽,可以很方便的用螺栓进行连接。用不同长度的角钢组合后,就可以得到不同大小的立方体和长方体及多边形。机器人身体的框架就搭建好了。在它的上面将装上:机器人的大脑——可编程控制器、机器人的眼睛耳朵——传感器、机器人的腿——驱动轮、机器人的手臂——机械传动专制、机器人的心脏——电池……之所以使用轻型万能角钢,主要是因为是在制作试验机型,而轻型万能角钢安装拆卸方便和便于修改长度,调整设计。
实验机器人定型后,就照其尺寸用不锈钢方管焊接制作机器人的身体。再在上面进行打孔等工作,后就可以将机器人的其它部分安装上去。这样一个机器人就制作好了。