图片来自 electrictourcompany.com
“赛格威”(英语:Segway)是一种电力驱动、具有自我平衡能力的个人用运输载具,是都市用交通工具的一种。由美国发明家狄恩·卡门与他的DEKA研发公司(DEKA Research and Development Corp.)团队发明设计,并创立思维车责任有限公司(Segway LLC.),自2001年12月起将思维车商业化量产销售。(资料来源:维基百科中文)
“赛格威”是一种让人留下深刻印象的代步工具,它占地不足一平方米,乘车人像使用滑板一样站立其上,双手解放,但却可以仅通过身体移动改变重心位置,就进行前进后退,转弯刹车等操作。传统的交通工具都无法做到随心而动,必须把大部分精力放在控制方向和速度上,而“赛格威”并不需要专门的操控装置,一切由车身自主完成,也由此获得了“平衡车”的别名。
“赛格威”平衡车看来神奇,但你有没有发现它的原理其实很简单呢?拜最新科技所赐,关键零件都可以在淘宝上直接买到,而控制程序也可以查阅原理自行编写。拥有自己的平衡车,其实非常简单。

“赛格威”的平衡问题,实际上是一个多级倒立摆问题。当一个人用手托住一根竹竿的底部使它在空中竖直不倒下,这就是一个一级倒立摆系统的模型。如果第一根竹竿上面用铰链连着其他竹竿,或者竹竿本身具有一定的弹性(可比拟“赛格威”上的有骨骼和关节的大活人),就成了多级倒立摆。

用手撑竹竿的游戏很多人都玩过,印象最深的应当是它是一个静不稳定系统。在桌面上的水杯能自己站稳,当重心投影落于杯底内时,即使有细小扰动也不会倒下。但是手心里的竹竿大部分时间重心投影不在接触点上,让竹竿保持相对不动靠的是动态调整——竹竿往哪边倒,手就赶紧往哪边凑,让重心回到接触点周围。这就是依靠人眼,大脑和人手完成的动态平衡过程。
人类的大脑在处理这类问题上有先天优势,因为人的走路过程本质上来说是不断前跌的过程,必须依靠实时伸出支撑脚转移重心来保证直立行进的动态平衡。而让机器人做到这一点就很困难,需要综合解决动态控制过程中的线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等诸多细节——所以至今见到的人形机器人里,能僵硬走路的很多,但能和真人一样上蹿下跳的绝无仅有。

两名民警驾驶“赛格威”单人警用巡逻车巡逻。图片来源:新华网
“赛格威”的动态平衡原理和倒立摆相同,将最上方的乘客作为摆臂,然后控制车轮维持系统重心使乘客直立。当驾驶人改变自己身体的角度往前或往后倾时,“赛格威”就会根据倾斜的方向前进或后退,而速度则与驾驶人身体倾斜的程度呈正比以保持平衡。这里的一个巧妙设计是将乘客传感和控制二合一了——“赛格威”前进或后退维持平衡的同时,也达成了按乘客意图前进或后退的目的。最终,熟练的驾驶人可以和自己行走一样,仅凭直觉就能完成前后左右各方向的运动,同时解放双手和大脑思维,这一特点使“赛格威”特别适合游览和警用巡逻。
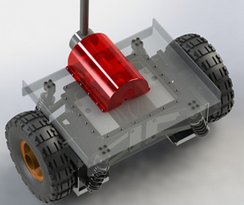
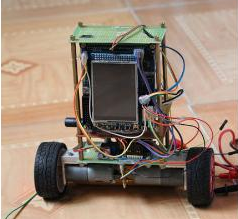
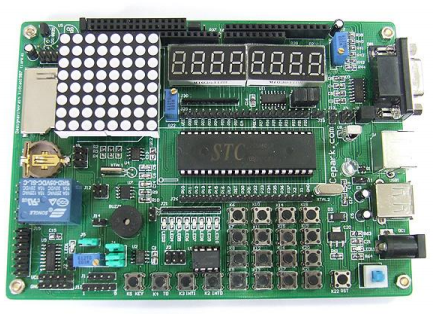
和人类行走一样,“赛格威”的控制也需要传感器和致动器。它依靠MEMS技术制造的精密固态陀螺仪和加速度计感应车体的旋转,速度和倾斜,高速微处理器计算传感器数据,并驱动轮毂电机完成前进/后退/差速转弯的动作。而在电路之外,为了让它从实验室中的倒立摆变成实用的代步车,还需要准备一些必需的结构零件和附件。
详情见附件。