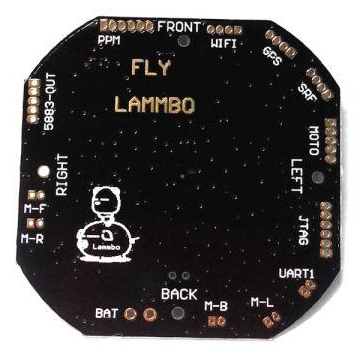
主控:STM32F103C8
SENSOR: MPU6050 HMC5883 MS5611
电源部分:3-18V IN,输出MAX:750mA 以支持外接设备
外接IO: WIFI GPS PPM并行输入(支持市场上成品接收机) 电机信号PPM输出(支持商用电调)以方便使用在大四轴上。
HMC部分已作消干扰处理,可以在四轴上使用指南针来纠正GIER,锁尾效果更好。
四路LED输出,方便指示工作状态。
电机部分均加二极管续流(此部分在测试时发现,小信号控制时有影响)。
另,PPM输入接口为SPI输入,在使用WIFI控制时,方便接入其它设备。
主板部分:

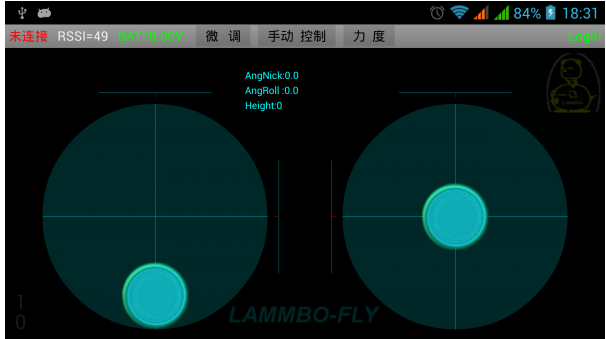
手机操作界面
手机操作说明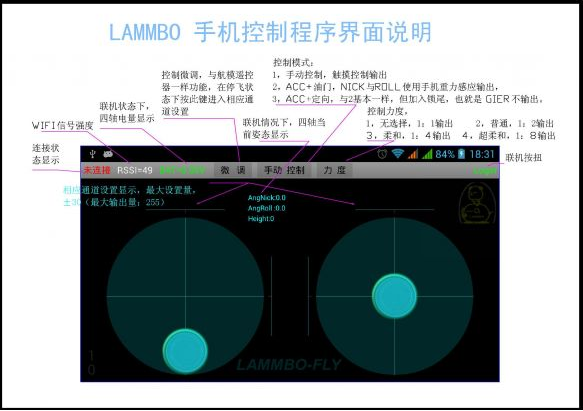
主板接口说明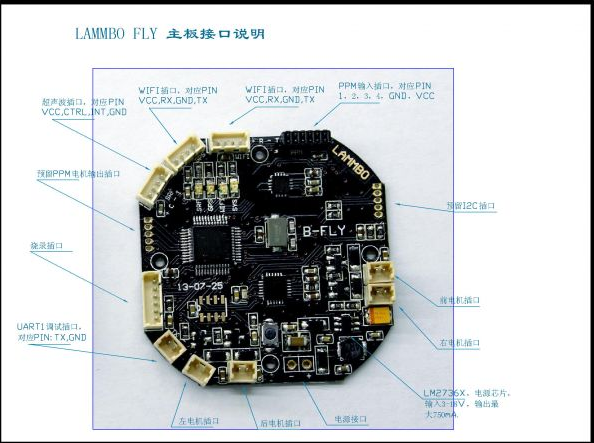

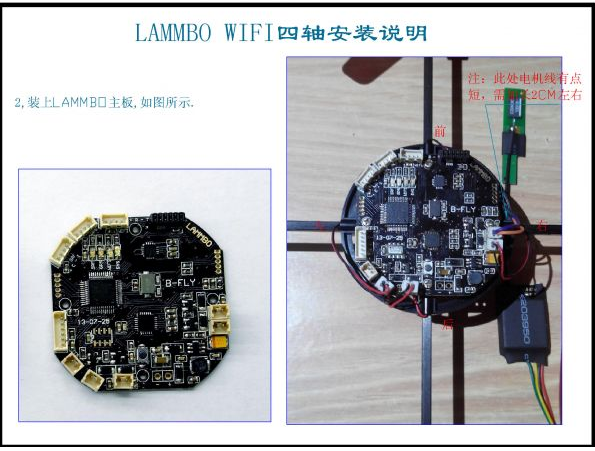
wifi模块






没有app搞毛啊

不好意思 看到了 》》
不是说话的开源共享程序吗?程序呢

这套配件哪里有,好想玩玩
这个要从何做起 我已经有了一个大四轴 手里有几个空心杯 想做个小的玩玩
材料在哪儿能买到

回复 言琛:你好,暂时没有
请问下,手机端app的源码有吗
谢谢
回复 小川子:你好,目前暂时没有,等我找到后联系你。
能给我一个基于stm32,外接MPU6050调整姿态,无需遥控的四旋翼源码吗,邮箱1649830439@qq.com,感激不尽
很像上手试试看

很好玩哎