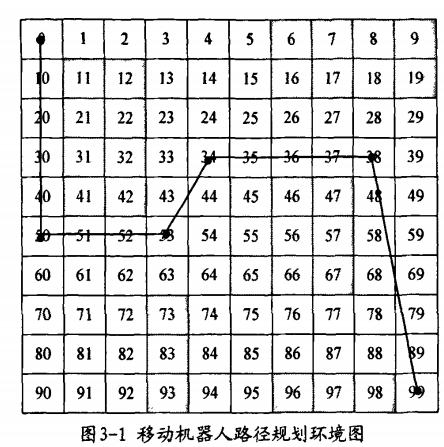
本文中的移动机器人路径规划包含两方面的内容:避障路径规划和TSP路径规划问题。避障路径规划是指依据某个或某些优化准则,在其工作空间中找到一条从起始点到目标点能避开所有障碍物的一条最优路径。TSP路径规划问题是指已知几个城市之间的相互距离,现有一个推销员必须遍访这几个城市,并且每个城市只能访问一次,最后又必须返回出发城市,如何安排他对这些城市的访问次序,使其旅行路线总长度最短。
Arduino-2WD轻量移动机器人旋转机动性测试
Arduino-2WD轻量型移动机器人超声波旋转侦测演示
Arduino-4WD移动机器人寻线与避障功能演示
Arduino-2WD轻量型移动机器人避障功能演示
Arduino-2WD轻量型移动机器人追光功能演示
单片机毕设调试指导视频9、继电器调试与外接负载方法
基于FPGA的交通灯设计(非单片机)-红外遥控通行状态
单片机毕设调试指导视频7、从protel中粘贴清晰图
x